SH & SH^+ [Momchil Konstantinov’s talk]
Let us begin with a rather informal and sketchy overview of the basics behind symplectic homology (this is by no means the most general version, and we refer the reader to the vast and growing literature, of which we give some references below).
Consider  a Liouville domain with contact boundary
a Liouville domain with contact boundary  and its completion
and its completion  , obtained from by attaching cylindrical ends. Given a nondegenerate Hamiltonian
, obtained from by attaching cylindrical ends. Given a nondegenerate Hamiltonian  , we have an associated action functional
, we have an associated action functional  , defined by
, defined by

Its differential is given by  , and it follows that its critical points correspond to closed Hamiltonian orbits. Given a
, and it follows that its critical points correspond to closed Hamiltonian orbits. Given a  -compatible almost complex structure
-compatible almost complex structure  which is cylindrical on the ends, this induces a metric on the loop space, for which the gradient of
which is cylindrical on the ends, this induces a metric on the loop space, for which the gradient of  can be written as
can be written as  , so that the gradient flow equation becomes the Floer equation. We define the symplectic homology chain complex (with mod 2 coefficients) as
, so that the gradient flow equation becomes the Floer equation. We define the symplectic homology chain complex (with mod 2 coefficients) as

By simplicity, assume that  is contractible (so that we don’t have to worry about homology classes and whatnot), and also assume that
is contractible (so that we don’t have to worry about homology classes and whatnot), and also assume that  (this condition can be relaxed to
(this condition can be relaxed to  , and is needed for the grading). Then we can define the Conley-Zehnder index of
, and is needed for the grading). Then we can define the Conley-Zehnder index of  by choosing spanning disks for and trivializing
by choosing spanning disks for and trivializing  along this disk, and we choose the grading
along this disk, and we choose the grading  , which is independent on the trivialization by the assumption on
, which is independent on the trivialization by the assumption on  . The differential is now
. The differential is now  , given by
, given by

where  is the moduli space of Floer trajectories joining to
is the moduli space of Floer trajectories joining to  divided by the natural
divided by the natural  -translation action. This moduli space is a zero dimensional manifold when
-translation action. This moduli space is a zero dimensional manifold when  (for generic ). Recall that Gromov compactness requires uniform
(for generic ). Recall that Gromov compactness requires uniform  -bounds (which in our situation are not for free, since
-bounds (which in our situation are not for free, since  is non-compact) and uniform energy bounds (which we have for
is non-compact) and uniform energy bounds (which we have for  , since
, since  ).
).
Def. The spectrum of  is
is

Def. The space of admissible Hamiltonians  is the set of Hamiltonians
is the set of Hamiltonians  satisfying
satisfying
 on
on  , for some
, for some  , where
, where  .
.
Denote by  , so that
, so that  on the ends.
on the ends.
If one chooses an admissible  and a which is cylindrical on the ends, one gets -bounds, as follows from the maximun principle: indeed, consider
and a which is cylindrical on the ends, one gets -bounds, as follows from the maximun principle: indeed, consider  an open subset, and
an open subset, and  a holomorphic map, which has a portion lying on the cylindrical ends. This portion can be parametrized by
a holomorphic map, which has a portion lying on the cylindrical ends. This portion can be parametrized by  , and a computation gives
, and a computation gives

The maximum principle then implies that a sequence of Floer cylinders with fixed asymptotics cannot escape to infinity, since we would get a maximum of  , which implies
, which implies  , and this cannot happen if one assumes that the maximum is non-degenerate (a clever trick then gets rid of this assumption). So we get the -bounds, which leads to compactness by Gromov, which implies
, and this cannot happen if one assumes that the maximum is non-degenerate (a clever trick then gets rid of this assumption). So we get the -bounds, which leads to compactness by Gromov, which implies  well-defined and
well-defined and  (as follows by studying the boundary of 1-dimensional moduli spaces of Floer trajectories). From this, one gets the Floer homology group
(as follows by studying the boundary of 1-dimensional moduli spaces of Floer trajectories). From this, one gets the Floer homology group

The first thing one asks is: is it independent of ? And the answer is…well… nope. BUT…
Consider two different  , and choose a smooth path of Hamiltonians
, and choose a smooth path of Hamiltonians  for
for  , such that
, such that  for
for  ,
,  , for
, for  , and
, and  for
for  , on the cylindrical ends. This gives the parametrized Floer equation
, on the cylindrical ends. This gives the parametrized Floer equation  and a corresponding moduli space
and a corresponding moduli space  joining the orbits
joining the orbits  and
and  , which is zero dimensional when
, which is zero dimensional when  (now we don’t have a translation action). This ideally would allow us to define a map
(now we don’t have a translation action). This ideally would allow us to define a map

given by

satisfying  , as follows by studying how trajectories in 1-dimensional moduli spaces can break. But this, again, requires Gromov compactness. A similar computation gives
, as follows by studying how trajectories in 1-dimensional moduli spaces can break. But this, again, requires Gromov compactness. A similar computation gives

So, to have  it suffices with
it suffices with

In other words, the slope of  is necessarily steeper than that of
is necessarily steeper than that of  . This means that we only get compactness in “one direction”, and we do not get a homotopically inverse map.
. This means that we only get compactness in “one direction”, and we do not get a homotopically inverse map.
If we define a partial order  on by
on by  if
if  outside of a compact set, the previous discussion gives us a map
outside of a compact set, the previous discussion gives us a map  . Moreover, we get commutative diagrams for any
. Moreover, we get commutative diagrams for any  , giving a direct system, so that we may define the symplectic homology of as
, giving a direct system, so that we may define the symplectic homology of as

Observe that, as with any direct limit, one can compute it by taking cofinal sequences. Now we identify the generators of this homology. Let us recall the following fact from Floer theory:
Fact. If is sufficiently  -small then all the 1-periodic orbits of
-small then all the 1-periodic orbits of  are critical points of , and every Floer trajectory between them is a Morse flow-line.
are critical points of , and every Floer trajectory between them is a Morse flow-line.
This means that if is sufficiently -small and positive on  , then the generators on this region of
, then the generators on this region of  will correspond to critical points (graded by
will correspond to critical points (graded by  ), and observe that
), and observe that  . On the cylindrical ends, we have
. On the cylindrical ends, we have  , where
, where  is the Reeb vector field of
is the Reeb vector field of  on
on  , so that closed Hamiltonian orbits lie in the contact slices
, so that closed Hamiltonian orbits lie in the contact slices  and are reparametrizations of closed Reeb orbits of period
and are reparametrizations of closed Reeb orbits of period  , and these have action
, and these have action

Since we assume that the slope of does not lie in the spectrum, there are no closed orbits for , and between  and we see potential closed Hamiltonian orbits of bounded action. Since the differential decreases action, we have a subcomplex
and we see potential closed Hamiltonian orbits of bounded action. Since the differential decreases action, we have a subcomplex  of
of  generated by orbits of negative action (critical points), and an exact sequence of chain complexes
generated by orbits of negative action (critical points), and an exact sequence of chain complexes

where  . If we define
. If we define

and we take direct limit in the resulting long exact sequence (which preserves exactness), we get an induced exact triangle
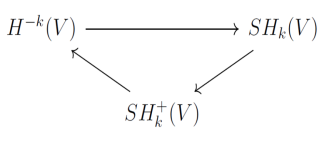
Here we have used the Floer theory fact, and the maximum principle, to say that  computes
computes  for every
for every  (
( -small on
-small on  ). Observe that we get cohomology of rather than homology, since we get a minus in the grading (
). Observe that we get cohomology of rather than homology, since we get a minus in the grading ( goes to
goes to  under the differential). Yes, it’s confusing.
under the differential). Yes, it’s confusing.
We can now state a few theorems.
Thm. [Bourgeois-Oancea] If all Reeb orbits of satisfy

that is, if is dynamically convex, and  are two Liouville fillings of
are two Liouville fillings of  with
with  , then
, then  .
.
In other words,  is an invariant of , rather than the fillings (with
is an invariant of , rather than the fillings (with  ). The idea is to show that no critical points can be connected to a non-constant orbit by a Floer trajectory, and that no cylinder connecting two of the latter ventures into the filling (there is a stretching the neck argument here).
). The idea is to show that no critical points can be connected to a non-constant orbit by a Floer trajectory, and that no cylinder connecting two of the latter ventures into the filling (there is a stretching the neck argument here).
Thm. [ML Yau] If  is subcritically Stein fillable (for a filling with ), then admits a dynamically convex contact form.
is subcritically Stein fillable (for a filling with ), then admits a dynamically convex contact form.
Thm. [Cieliebak] If is subcritically Stein (with ), then it has vanishing symplectic homology.
Cieliebak proves that is isomorphic to a split Stein manifold  , for
, for  Stein, and using a version of the Künneth formula for
Stein, and using a version of the Künneth formula for  , the result follows from the fact that
, the result follows from the fact that  , which one can compute by hand.
, which one can compute by hand.
Cor. If are subcritical Stein fillings of with , then  .
.
This follows from the exact triangle, and all theorems stated above, since  for a subcritical Stein manifold with .
for a subcritical Stein manifold with .
References
A few references on symplectic homology (by all means very much non-exhaustive):
A begginer’s overview: https://www.mathematik.hu-berlin.de/~wendl/pub/SH.pdf
A nice survey: https://arxiv.org/abs/math/0403377
A Morse-Bott version (relevant for Cédric’s talk below): https://arxiv.org/abs/0704.1039
A related theory (Rabinowitz Floer homology): https://arxiv.org/abs/0903.0768
Contact manifolds with flexible fillings [Scott Zhang’s talk]
The main reference for this post is this paper: https://arxiv.org/pdf/1610.04837.pdf.
Let us recall the following result, which appeared in Momchil’s talk:
Thm. [M.L Yau] If  are two subcritical fillings of a contact manifold
are two subcritical fillings of a contact manifold  , (with
, (with  ) then
) then  .
.
The goal for this talk was to discuss the following generalization to the  case:
case:
Thm 1. [O. Lazarev] If  are two flexible fillings of , then .
are two flexible fillings of , then .
Remark: The same conclusion is true if we consider fillings with vanishing symplectic homology.
The idea is to replace the dynamical convexity condition in Bourgeois-Oancea’s result by an asymptotic version. In the following, given  contact forms for the same contact structure, we will denote
contact forms for the same contact structure, we will denote  if
if  for some smooth function
for some smooth function  , and by
, and by  the set of -Reeb orbits
the set of -Reeb orbits  with action
with action  . The degree of a Reeb orbit is
. The degree of a Reeb orbit is  .
.
Def. is asymptotically dynamically convex (ADC) if there exists a sequence of contact forms  for
for  and a sequence
and a sequence  with
with  such that every element in
such that every element in  has positive degree.
has positive degree.
We have the following:
Thm 2. [O. Lazarev] If is ADC, then  is independent of the Stein filling with .
is independent of the Stein filling with .
Recall that flexible Weinstein manifolds have vanishing symplectic homology. This follows by the Bourgeois-Ekholm=Eliashberg surgery formula (https://arxiv.org/pdf/0911.0026.pdf), but there are alternative arguments not using the SFT machinery, based on an h-principle for exact codimension zero embeddings, and the Künneth formula for symplectic homology, which even works for twisted coefficients (see e.g. Murphy-Siegel https://arxiv.org/abs/1510.01867). From the exact triangle for  , we know that
, we know that  for flexible , so to get thm. 1 it suffices to show that flexible fillings induce ADC contact structures on their boundaries.
for flexible , so to get thm. 1 it suffices to show that flexible fillings induce ADC contact structures on their boundaries.
Thm 3. [O. Lazarev] If  is obtained from by flexible surgery and is ADC, then so is .
is obtained from by flexible surgery and is ADC, then so is .
Remark. The subcritical case where the ADC condition is replaced by DC (dynamical convexity) is already due to Yau.
Since the standard sphere is ADC, thm. 1 follows.
Here are a few ingredients in the argument. Let us recall first the following:
Prop. [Bourgeois-Ekholm-Eliashberg] After surgery along a Legendrian sphere  , we have a 1-1 correspondence between the newly created Reeb orbits with action bounded by
, we have a 1-1 correspondence between the newly created Reeb orbits with action bounded by  , and words of Reeb chords on
, and words of Reeb chords on  with action bounded by
with action bounded by  (up to cyclic permutation). Moreover, we have
(up to cyclic permutation). Moreover, we have  , where
, where  denotes the Reeb orbit corresponding to the word
denotes the Reeb orbit corresponding to the word  .
.
The idea is to slightly perturb the data so that given a collection of ordered chords, there is a closed Reeb orbit which enters the handle and is close to the original chords in the complement of the handle (the fact that all closed orbits that enter the handle have to leave it boils down to the fact that the geodesics on the flat disk leave the disk).
Key lemma. If is loose, there exists a Legendrian isotopy such that (action bounded) Reeb chords have positive degree.
The point is that stabilizing a loose Legendrian, which in general does not change the formal homotopy type, actually does not change the genuine isotopy type, by Murphy’s h-principle, and one can explicitly see that the degree of the resulting Reeb chords is greater or equal than 1 after the stabilization. The fact that we get decreasing contact forms comes form this stabilization process.
Computations on Brieskorn manifolds [Cédric De Groote’s talk]
The goal for this talk, much more computational in spirit, was to discuss how invariants like contact and symplectic homology can be used to distinguish contact structures on Brieskorn manifolds, specially when the underlying manifolds are diffeomorphic, and in certain cases even when the contact structures are homotopic as almost contact structures. A useful tool is a Morse-Bott version of symplectic homology, which applies in many cases where a lot of symmetry in present in the setup.
Brieskorn manifolds and Ustilovsky exotic contact spheres
The Brieskorn manifold associated to  , where
, where  is an integer, is defined by
is an integer, is defined by  . In other words, it is the link of the (isolated) singularity associated to the complex polynomial
. In other words, it is the link of the (isolated) singularity associated to the complex polynomial  . It is the binding of an open book on
. It is the binding of an open book on  , with pages which are diffeomorphic to
, with pages which are diffeomorphic to  , for small
, for small  (the Milnor fiber of
(the Milnor fiber of  , see Milnor’s classic book: “Singular points of complex hypersurfaces”).
, see Milnor’s classic book: “Singular points of complex hypersurfaces”).
Brieskorn manifolds come with a contact form  , which is induced by the “weighted” exact symplectic form
, which is induced by the “weighted” exact symplectic form  on
on  , with associated Liouville vector field
, with associated Liouville vector field  , which is transverse to
, which is transverse to  . The corresponding Reeb vector field is
. The corresponding Reeb vector field is  , which has flow
, which has flow  . We also have a filling for , given by
. We also have a filling for , given by  , where
, where  satisfies
satisfies  close to , and vanishes close to
close to , and vanishes close to  (so that
(so that  is a non-singular interpolation between the Milnor fiber and the singular hypersurface
is a non-singular interpolation between the Milnor fiber and the singular hypersurface  ). It comes endowed with the restriction of
). It comes endowed with the restriction of  , and is therefore an exact filling (it is actually Stein). By thm. 5.1 in Milnor’s book, it is parallelizable, and hence
, and is therefore an exact filling (it is actually Stein). By thm. 5.1 in Milnor’s book, it is parallelizable, and hence  .
.
Some interesting facts:
 , i.e is
, i.e is  -connected (lemma 6.4 in Milnor, which works for any Milnor fiber).
-connected (lemma 6.4 in Milnor, which works for any Milnor fiber).- If
 , is homeomorphic to a sphere if and only if it is a homology sphere (For
, is homeomorphic to a sphere if and only if it is a homology sphere (For  it follows by 1. above -which implies simply connectedness-, and the generalized Poincaré hypothesis, and is trivial for
it follows by 1. above -which implies simply connectedness-, and the generalized Poincaré hypothesis, and is trivial for  ). By 1., Poincaré duality and Hurewicz’ theorem, this is equivalent to the reduced homology
). By 1., Poincaré duality and Hurewicz’ theorem, this is equivalent to the reduced homology  .
.
- There exist conditions on which are equivalent to being homeomorphic to the sphere
 . Namely, If there exist
. Namely, If there exist  which are relatively prime to all other exponents, OR there exist
which are relatively prime to all other exponents, OR there exist  which is relatively prime to all others and a set
which is relatively prime to all others and a set  such that every
such that every  is relatively prime to every exponent not in the set, and
is relatively prime to every exponent not in the set, and  for
for  .
.
 for
for  gives all smooth structures in
gives all smooth structures in  (it is homeomorphic to the sphere by the previous criterion).
(it is homeomorphic to the sphere by the previous criterion).- Any simply connected spin 5-manifold is a connect sum of Brieskorn 5-manifolds.
Thm.[Brieskorn] If  then
then  , where the number of 2’s is
, where the number of 2’s is  , is diffeomorphic to
, is diffeomorphic to  .
.
Denote by  the contact structure on that we obtain by the weighted symplectic form, as above. Observe that by the above criterion these manifolds are all homeomorphic to spheres.
the contact structure on that we obtain by the weighted symplectic form, as above. Observe that by the above criterion these manifolds are all homeomorphic to spheres.
Thm.[Ustilovsky] If  , then
, then  is not contactomorphic to
is not contactomorphic to  .
.
The proof uses contact homology. One can take an explicit perturbation making the contact form non-degenerate, and compute the degrees of the resulting non-degenerate Reeb orbits, which are all even. This implies that the differential vanishes, so that contact homology is isomorphic to the underlying chain complex. For different values of  , the degrees of the generators differ, and hence contact homology does also (and this is an invariant of the contact structure).
, the degrees of the generators differ, and hence contact homology does also (and this is an invariant of the contact structure).
Def. An almost contact structure on  is a pair
is a pair  of a 1-form and a 2-form
of a 1-form and a 2-form  such that
such that  is non-degenerate. This is equivalent to having a reduction of the structure group of
is non-degenerate. This is equivalent to having a reduction of the structure group of  to
to  .
.
Def. A contact sphere  is called exotic if it is not contactomorphic to
is called exotic if it is not contactomorphic to  , the standard contact structure on . It is homotopically trivial if it is homotopic to as almost contact structures.
, the standard contact structure on . It is homotopically trivial if it is homotopic to as almost contact structures.
An almost contact structure on is equivalent to a lift of the classifying map  to a map
to a map  , under the natural map
, under the natural map  induced by inclusion. This map has fibers
induced by inclusion. This map has fibers  , and therefore almost contact structures are classified by the group
, and therefore almost contact structures are classified by the group  .
.
Thm.[Massey]  is cyclic of order
is cyclic of order  if
if  even, and
even, and  if odd.
if odd.
Thm.[Morita] The contact structure on represents  in when viewed as an almost contact structure.
in when viewed as an almost contact structure.
It follows that if  and
and  then is homotopically trivial. Since there are infinitely many ‘s satisfying these conditions, we obtain:
then is homotopically trivial. Since there are infinitely many ‘s satisfying these conditions, we obtain:
Thm.[Ustilovsky] There exist infinitely many exotic but homotopically trivial contact structures on .
Morse-Bott techniques
The Morse-Bott condition is morally the next best thing to having non-degeneracy (in fact, one can argue that it is the best thing when one wishes to do computations), and it can be thought of as a manifestation of symmetry.
Recall that a function  is Morse-Bott if its critical set
is Morse-Bott if its critical set  is a disjoint union of connected submanifolds
is a disjoint union of connected submanifolds  , such that, if we denote by
, such that, if we denote by  the normal bundle of inside , then
the normal bundle of inside , then  is non-degenerate.
is non-degenerate.
Loosely speaking, the degeneracies are “well-controlled”, and come in “families”. In general, in the Morse-Bott situation, one hopes for a perturbation scheme which recovers the non-degenerate/Morse case, by a small perturbation of the data, in such a way that one gets a 1-1 correspondence between the symmetric (i.e Morse-Bott) data, and the generic (i.e Morse) one, and so that compuations can be carried out in the Morse-Bott setting in the first place. For instance, if one wishes to compute Morse homology from a Morse-Bott function , one can choose a Morse function  on
on  , and consider
, and consider  , for small, and
, for small, and  is a bump function with support near . The critical points of
is a bump function with support near . The critical points of  are exactly those of , and there is a well-defined notion of convergence of flow-lines of to “cascades” (when the perturbation parameter
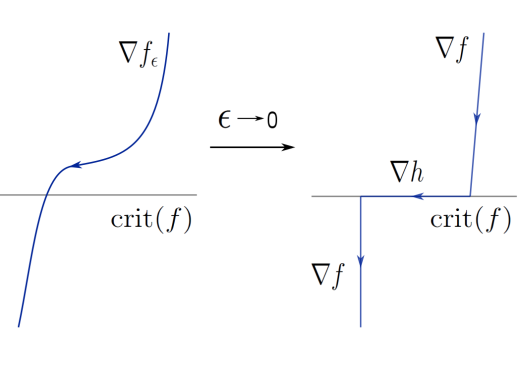
are exactly those of , and there is a well-defined notion of convergence of flow-lines of to “cascades” (when the perturbation parameter  is taken to go to zero). The latter consist of a flow-line of hitting a critical manifold, followed by a flow-line segment of along this manifold, followed by another flow-line of hitting another critical manifold, and so on, finishing in a critical point of (see the figure below). One can define the index of a cascade in such a way that the index is preserved under this convergence, and there is a 1-1 correspondence between index
is taken to go to zero). The latter consist of a flow-line of hitting a critical manifold, followed by a flow-line segment of along this manifold, followed by another flow-line of hitting another critical manifold, and so on, finishing in a critical point of (see the figure below). One can define the index of a cascade in such a way that the index is preserved under this convergence, and there is a 1-1 correspondence between index  cascades and index Morse flow-lines of . Hence, one can define a Morse-Bott differential which counts cascades, and the resulting Morse-Bott (co)homology coincides with the usual Morse (co)homology.
cascades and index Morse flow-lines of . Hence, one can define a Morse-Bott differential which counts cascades, and the resulting Morse-Bott (co)homology coincides with the usual Morse (co)homology.
In the setting of symplectic homology, if is a Liouville filling of a contact manifold and is an admissible autonomous Hamiltonian, then we have closed Hamiltonian orbits in the contact slices  corresponding to closed Reeb orbits, which come in
corresponding to closed Reeb orbits, which come in  -families obtained by reparametrizations (since is time-independent). This is then a Morse-Bott situation.
-families obtained by reparametrizations (since is time-independent). This is then a Morse-Bott situation.
[Bourgeois-Oancea] In the Morse-Bott situation described above, if we assume that the orbits come in -families (and there are no further directions of degeneracy), then there is a Morse-Bott version of symplectic homology of ,  .
.
More generally, one can ask the following Morse-Bott conditions:  is closed submanifold (where
is closed submanifold (where  is the time
is the time  Reeb flow), such that
Reeb flow), such that  is locally constant and
is locally constant and  . Informally, one can think of this as an infinite-dimensional version of the Morse-Bott conditions, applied to the action functional defined on the loop space, whose critical points are closed Hamiltonian orbits. Assuming that
. Informally, one can think of this as an infinite-dimensional version of the Morse-Bott conditions, applied to the action functional defined on the loop space, whose critical points are closed Hamiltonian orbits. Assuming that  and the closed orbits are contractible (so we get an integer grading), fix a choice of Morse functions
and the closed orbits are contractible (so we get an integer grading), fix a choice of Morse functions  on
on  for every . The generators will correspond to pairs
for every . The generators will correspond to pairs  where
where  , and the differential counts “Floer cascades”, consisting of a Floer cylinder, followed by a flow-line segment of a , followed by another Floer cylinder…(finitely many times). The grading is defined by
, and the differential counts “Floer cascades”, consisting of a Floer cylinder, followed by a flow-line segment of a , followed by another Floer cylinder…(finitely many times). The grading is defined by  , where
, where  is the Robin-Salamon index, and with this definition the differential has degree -1. Under these conditions, we have a Morse-Bott version of symplectic homology
is the Robin-Salamon index, and with this definition the differential has degree -1. Under these conditions, we have a Morse-Bott version of symplectic homology  .
.
Uebele’s computation
We focus now on the Brieskorn manifolds  , where there are
, where there are  2’s, for odd , endowed with the contact structure discussed in the first part of this talk. Randell’s algorithm gives
2’s, for odd , endowed with the contact structure discussed in the first part of this talk. Randell’s algorithm gives  , and it follows from Wall’s classification of highly-connected manifolds that
, and it follows from Wall’s classification of highly-connected manifolds that  if
if  ,
,  if
if  ,
,  if
if  ,
,  if
if  . Here,
. Here,  is Kervaire’s sphere. If
is Kervaire’s sphere. If  ,
,  is diffeomorphic to
is diffeomorphic to  , and hence
, and hence  is always
is always  .
.
These contact manifolds manifolds are actually not distinguishable by contact homology. However, we have:
Thm. [Uebele] The manifolds  are pairwise non-contactomorphic.
are pairwise non-contactomorphic.
This uses the following lemma:
Lemma. For ,  is independent of the filling, as long as
is independent of the filling, as long as  .
.
This is proved by showing that these manifolds are dynamically convex, and using an analogous version of Bourgeois-Oancea result. Therefore one can regard as a contact invariant.
The idea now is to compute of the natural filling of these Brieskorn manifolds, using the Morse-Bott techniques, and showing that they are pairwise different. One can choose perfect Morse functions along the critical manifolds (or “formally pretend” that one can, by a spectral sequence argument due to Fauck), making the Morse differential trivial, and between different critical manifolds, one sees that for each consecutive degrees  there exists a unique pair of generators having these degrees, the one with bigger degree
there exists a unique pair of generators having these degrees, the one with bigger degree  having lower action than the one with smaller degree
having lower action than the one with smaller degree  . Since the differential has degree -1 and lowers the action, it has to vanish (this works for
. Since the differential has degree -1 and lowers the action, it has to vanish (this works for  , and a different argument is needed for ). The upshot is that the Morse-Bott symplectic homology coincides with its chain complex, and the degrees differ for different values of
, and a different argument is needed for ). The upshot is that the Morse-Bott symplectic homology coincides with its chain complex, and the degrees differ for different values of  .
.
References
A nice reference for a survey of Brieskorn manifolds in contact topology can be found here: https://arxiv.org/abs/1310.0343
Ustilovsky’s exotic spheres: 1999-14-781
Uebele’s computations: https://arxiv.org/abs/1502.04547
Fauck’s thesis (related, and uses RFH): https://arxiv.org/abs/1605.07892


(meaning
where
is the Hodge star with respect to
)
-structure








































![c_1(X,\omega)[\omega] < 0](https://s0.wp.com/latex.php?latex=c_1%28X%2C%5Comega%29%5B%5Comega%5D+%3C+0&bg=ffffff&fg=333333&s=0&c=20201002)























![c_1(X) \cdot [\omega] = 0](https://s0.wp.com/latex.php?latex=c_1%28X%29+%5Ccdot+%5B%5Comega%5D+%3D+0&bg=ffffff&fg=333333&s=0&c=20201002)


































 , where
, where is a compact symplectic manifold with boundary
is a compact symplectic manifold with boundary , which is also transverse to the boundary
, which is also transverse to the boundary 
 is a Morse function
is a Morse function , meaning there is some constant
, meaning there is some constant  with
with  with respect to a given Riemannian metric.
with respect to a given Riemannian metric. , where
, where  and into
and into  . Note that the 1-form
. Note that the 1-form  satisfies
satisfies  , and is sometimes called the Liouville 1-form, since it encodes the same data as
, and is sometimes called the Liouville 1-form, since it encodes the same data as  is what we called a Weinstein filling.
is what we called a Weinstein filling. ) and ensure that the critical points of
) and ensure that the critical points of  as very important, but rather the data up to some notion of homotopy. For example, one can always perturb the Morse function so that each of
as very important, but rather the data up to some notion of homotopy. For example, one can always perturb the Morse function so that each of  be the flow along
be the flow along  , and suppose we choose some
, and suppose we choose some  where
where  is some descending manifold for a given critical point
is some descending manifold for a given critical point  is a vector in the tangent space. Then since
is a vector in the tangent space. Then since  , we have that
, we have that
 , the right hand side goes to zero since
, the right hand side goes to zero since  for all
for all  in a curve
in a curve  at
at  . Hence,
. Hence,  , from which it follows that
, from which it follows that  . Hence,
. Hence,  , and so also
, and so also  .
. are of index at most
are of index at most  and attaching handles of index at most
and attaching handles of index at most  , the symplectic condition on
, the symplectic condition on  implies that
implies that  is a contact form. The proof of the lemma above further implies that
is a contact form. The proof of the lemma above further implies that  gives an isotropic submanifold of
gives an isotropic submanifold of  with respect to
with respect to  is completely determined up to symplectomorphism by its symplectic normal bundle,
is completely determined up to symplectomorphism by its symplectic normal bundle,  , as a symplectic vector bundle (with symplectic structure induced by
, as a symplectic vector bundle (with symplectic structure induced by  , where
, where  is symplectic on
is symplectic on  along the isotropic attaching spheres.
along the isotropic attaching spheres. . Then the handles of index
. Then the handles of index  are called subcritical handles, whereas the handles of index
are called subcritical handles, whereas the handles of index  are called critical handles. When
are called critical handles. When  , we can recreate all parts of the proof of the h-cobordism theorem for subcritical Weinstein cobordisms. In some sense, subcritical Weinstein domains have no symplectic geometry in them – they are encoded by algebro-topological information, and so this gives some flexibility phenomena.
, we can recreate all parts of the proof of the h-cobordism theorem for subcritical Weinstein cobordisms. In some sense, subcritical Weinstein domains have no symplectic geometry in them – they are encoded by algebro-topological information, and so this gives some flexibility phenomena. . In this case, it is pretty easy to describe a connected Weinstein domain (or its contact boundary). One can first order the handles by index, and then cancel 0-handles with 1-handles until we are in the situation where there is precisely one 0-handle and possibly many 1- and 2-handles. The boundary of the 0-handle is just a standard contact
. In this case, it is pretty easy to describe a connected Weinstein domain (or its contact boundary). One can first order the handles by index, and then cancel 0-handles with 1-handles until we are in the situation where there is precisely one 0-handle and possibly many 1- and 2-handles. The boundary of the 0-handle is just a standard contact  , and 1-handle attachment is trivially described by picking pairs of points in
, and 1-handle attachment is trivially described by picking pairs of points in  ). So it suffices to draw Legendrians on
). So it suffices to draw Legendrians on  pairs of points identified, which is just
pairs of points identified, which is just  . Any Legendrian
. Any Legendrian  . The front projection is the projection to the coordinates
. The front projection is the projection to the coordinates  , so that
, so that  . It might not be obvious how to draw a smooth knot in this projection since the curve can’t have infinite slope, but we are allowed semi-cubical cusps, corresponding to
. It might not be obvious how to draw a smooth knot in this projection since the curve can’t have infinite slope, but we are allowed semi-cubical cusps, corresponding to  . Note that transverse crossings are also allowed, since the
. Note that transverse crossings are also allowed, since the 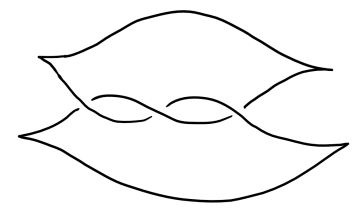
 with finitely many critical points with distinct critical values such that locally around the critical points,
with finitely many critical points with distinct critical values such that locally around the critical points,  looks like a complex Morse function (i.e.
looks like a complex Morse function (i.e.  in local coordinates). When
in local coordinates). When  has boundary, we assume the critical values of
has boundary, we assume the critical values of  (although see
(although see 
 , where the superscripts are meant to indicate vertical and horizontal. That is,
, where the superscripts are meant to indicate vertical and horizontal. That is,  , while
, while  . If we write
. If we write  for a regular fiber of
for a regular fiber of  . Meanwhile, we see that
. Meanwhile, we see that  is just a fibration over
is just a fibration over  fixing the boundary, so that
fixing the boundary, so that ![\partial^v W = F \times [0,1]/{\sim}](https://s0.wp.com/latex.php?latex=%5Cpartial%5Ev+W+%3D+F+%5Ctimes+%5B0%2C1%5D%2F%7B%5Csim%7D&bg=ffffff&fg=333333&s=0&c=20201002) where
where  (the mapping torus of
(the mapping torus of  in the natural way, is called an open book decomposition. It is given completely by the pair
in the natural way, is called an open book decomposition. It is given completely by the pair  . We think of each fiber over
. We think of each fiber over  as the binding, analogous to what one would get if one took their favorite book and matched the covers so that the pages radiate outwards. So Lefschetz fibrations yield open books on the boundary. To be a little more precise, one should extend each page so that the boundary of each page is actually the binding.
as the binding, analogous to what one would get if one took their favorite book and matched the covers so that the pages radiate outwards. So Lefschetz fibrations yield open books on the boundary. To be a little more precise, one should extend each page so that the boundary of each page is actually the binding.
 is a regular value (which can always be arranged up to small perturbation of
is a regular value (which can always be arranged up to small perturbation of  . One can ask what happens when we extend to
. One can ask what happens when we extend to  , where
, where  and there is exactly one critical value
and there is exactly one critical value  .
. yield monodromy maps (up to isotopy preserving boundary) on the fibers. We can choose a connection on the fibration if we wish to make this a map on fibers, not just a map up to isotopy. If we take a path
yield monodromy maps (up to isotopy preserving boundary) on the fibers. We can choose a connection on the fibration if we wish to make this a map on fibers, not just a map up to isotopy. If we take a path  once and otherwise avoids critical values then for whatever connection we chose, we can see what points flow to the critical point over
once and otherwise avoids critical values then for whatever connection we chose, we can see what points flow to the critical point over 
 by 2-handle attachment, where the attaching curve is just the vanishing cycle above
by 2-handle attachment, where the attaching curve is just the vanishing cycle above  and the core of the handle is the thimble. Furthermore, one can check by a local computation that the monodromy map in a loop around
and the core of the handle is the thimble. Furthermore, one can check by a local computation that the monodromy map in a loop around  , one can choose a different basis of vanishing paths, and this yields a possibly different factorization for the monodromy. Such changing of the basis is generated by so-called Hurwitz moves, as drawn below.
, one can choose a different basis of vanishing paths, and this yields a possibly different factorization for the monodromy. Such changing of the basis is generated by so-called Hurwitz moves, as drawn below.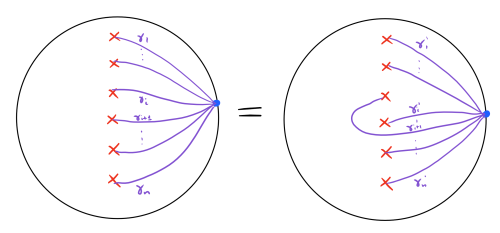
 th and
th and  st critical points. Note that the corresponding vanishing cycles for the critical point corresponding to
st critical points. Note that the corresponding vanishing cycles for the critical point corresponding to  and
and  are actually different, but the overall monodromy on the open book at the boundary is the same.
are actually different, but the overall monodromy on the open book at the boundary is the same. (of genus 1 and with one boundary component) with two distinct factorizations into positive Dehn twists such that the Weinstein fillings are distinguished by their first homology.
(of genus 1 and with one boundary component) with two distinct factorizations into positive Dehn twists such that the Weinstein fillings are distinguished by their first homology. where
where  (of genus 1 with three boundary components) which admits infinitely many positive factorizations such that the corresponding Weinstein fillings are all distinguished from each other by their first homology.
(of genus 1 with three boundary components) which admits infinitely many positive factorizations such that the corresponding Weinstein fillings are all distinguished from each other by their first homology. .
.
 .
. and
and  are also tight, where as the others’ universal covers are overtwisted. We say
are also tight, where as the others’ universal covers are overtwisted. We say  are virtually overtwisted.
are virtually overtwisted. has a unique Weinstein filling (up to symplectic deformation) and a unique minimal weak filling.
has a unique Weinstein filling (up to symplectic deformation) and a unique minimal weak filling. , the disk with
, the disk with  -surgery on some knot. Finally, an appeal to work of
-surgery on some knot. Finally, an appeal to work of  . The idea was that if we had a filling
. The idea was that if we had a filling  is the symplectic manifold
is the symplectic manifold  , where
, where  , then
, then  where
where  sending
sending  .
. -bundle over
-bundle over  . Fixing a local section
. Fixing a local section  for the fiber such that the symplectic form is just
for the fiber such that the symplectic form is just  . We simply take the component where
. We simply take the component where  and
and 
 is a compatible almost complex structure for
is a compatible almost complex structure for 
 on which there is nontrivial behavior, where
on which there is nontrivial behavior, where  remains fixed but
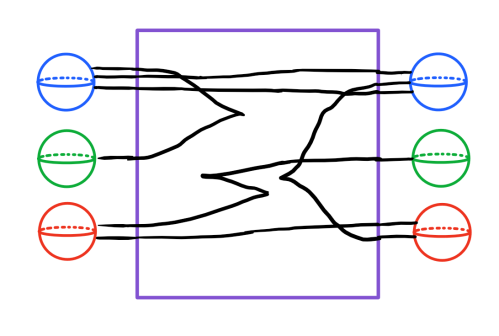
remains fixed but  . In the limit, as these two intervals get farther apart, we break into two holomorphic curves in the symplectization. This forms what is sometimes called a holomorphic building. In general, there may be multiple levels in the limit, as in the figure below.
. In the limit, as these two intervals get farther apart, we break into two holomorphic curves in the symplectization. This forms what is sometimes called a holomorphic building. In general, there may be multiple levels in the limit, as in the figure below.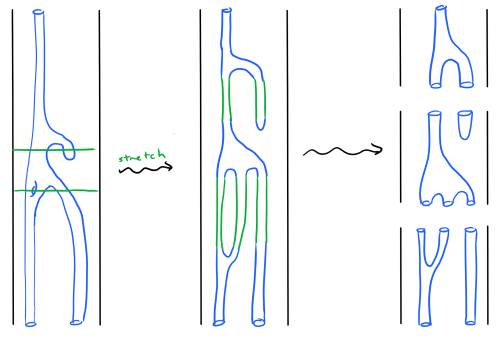
![((-\epsilon,0] \times M, d(e^t\alpha))](https://s0.wp.com/latex.php?latex=%28%28-%5Cepsilon%2C0%5D+%5Ctimes+M%2C+d%28e%5Et%5Calpha%29%29&bg=ffffff&fg=333333&s=0&c=20201002) where
where  , to form a completed symplectic manifold
, to form a completed symplectic manifold  . I can choose some compatible almost complex structure
. I can choose some compatible almost complex structure  . In this case, one can study J-holomorphic curves, and we have a similar Gromov compactness statement. In this case, our curves can either bubble, or form holomorphic buildings where the lowest level is just
. In this case, one can study J-holomorphic curves, and we have a similar Gromov compactness statement. In this case, our curves can either bubble, or form holomorphic buildings where the lowest level is just  and whose higher levels are all
and whose higher levels are all  .
. ).
). of the moduli space containing a special leaf in the symplectization end. This component is 2-dimensional, and hence is precisely given by the foliating leaves around it (recall
of the moduli space containing a special leaf in the symplectization end. This component is 2-dimensional, and hence is precisely given by the foliating leaves around it (recall  , where the fibers are symplectic (since they are J-holomorphic and
, where the fibers are symplectic (since they are J-holomorphic and  ) and generically smooth except with finitely many nodal singular fibers, forming what is called a symplectic Lefschetz fibration.
) and generically smooth except with finitely many nodal singular fibers, forming what is called a symplectic Lefschetz fibration. ? The answer is yes in the case when
? The answer is yes in the case when  (with contact structure induced by the restriction of the Liouville form on
(with contact structure induced by the restriction of the Liouville form on  to the unit cotangent bundle). In this case, any strong filling, not just the standard one, would have
to the unit cotangent bundle). In this case, any strong filling, not just the standard one, would have ![\overline{\mathcal{M}_0} = [0,1] \times S^1](https://s0.wp.com/latex.php?latex=%5Coverline%7B%5Cmathcal%7BM%7D_0%7D+%3D+%5B0%2C1%5D+%5Ctimes+S%5E1&bg=ffffff&fg=333333&s=0&c=20201002) , and so any strong filling of
, and so any strong filling of ![[0,1] \times S^1](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D+%5Ctimes+S%5E1&bg=ffffff&fg=333333&s=0&c=20201002) . Wendl then beefs this up to prove, for example, that every minimal strong filling of
. Wendl then beefs this up to prove, for example, that every minimal strong filling of  .
. satisfying some conditions. If there is some other leaf
satisfying some conditions. If there is some other leaf  which is not diffeomorphic to
which is not diffeomorphic to ![([0,1] \times T^2, \cos(2\pi t)d\theta_1 + \sin(2\pi t)d\theta_2)](https://s0.wp.com/latex.php?latex=%28%5B0%2C1%5D+%5Ctimes+T%5E2%2C+%5Ccos%282%5Cpi+t%29d%5Ctheta_1+%2B+%5Csin%282%5Cpi+t%29d%5Ctheta_2%29&bg=ffffff&fg=333333&s=0&c=20201002) , obstructs fillability, originally
, obstructs fillability, originally  have a surgery theory consisting of handles of index at most
have a surgery theory consisting of handles of index at most  . The main theorem states that the existence of just one subcritical Weinstein filling places restrictions on the topology of any strong symplectically aspherical filling
. The main theorem states that the existence of just one subcritical Weinstein filling places restrictions on the topology of any strong symplectically aspherical filling  .
. admitting a subcritical Stein filling with the homotopy type of a CW complex of dimension
admitting a subcritical Stein filling with the homotopy type of a CW complex of dimension  , then any strong symplectically aspherical filling
, then any strong symplectically aspherical filling  for
for  via the isomorphism induced by inclusion
via the isomorphism induced by inclusion otherwise
otherwise , then all strong aspherical fillings of
, then all strong aspherical fillings of  , McDuff’s theorem from last time about fillings of lens spaces implies that there is a unique minimal filling up to diffeomorphism. By positivity of intersection, symplectically aspherical fillings are minimal, which implies the above result. But also, since
, McDuff’s theorem from last time about fillings of lens spaces implies that there is a unique minimal filling up to diffeomorphism. By positivity of intersection, symplectically aspherical fillings are minimal, which implies the above result. But also, since  a Liouville manifold of finite type (meaning it is modelled after a positive symplectization outside of some compact region). Let
a Liouville manifold of finite type (meaning it is modelled after a positive symplectization outside of some compact region). Let  be the corresponding Liouville vector field (satisfying
be the corresponding Liouville vector field (satisfying  ). The
). The  in
in  such that:
such that: where
where  is the standard radial Liouville vector field on
is the standard radial Liouville vector field on 
 is modelled after the positive symplectization of
is modelled after the positive symplectization of 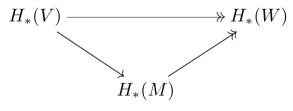
 replaced with
replaced with  ).
). -spliffable, and using smooth topology.
-spliffable, and using smooth topology. of a closed manifold
of a closed manifold  admits no subcritical Weinstein fillings.
admits no subcritical Weinstein fillings. surjects onto
surjects onto  with
with  . This is a contradiction.
. This is a contradiction. so that it is convex (which we can do by the spliffability condition). The interior component determine by the splitting through
so that it is convex (which we can do by the spliffability condition). The interior component determine by the splitting through  such that the interior embeds diffeomorphically onto
such that the interior embeds diffeomorphically onto  . This embedding then gives us a smooth manifold
. This embedding then gives us a smooth manifold  which looks like
which looks like  but with the interior component replaced by
but with the interior component replaced by  .
.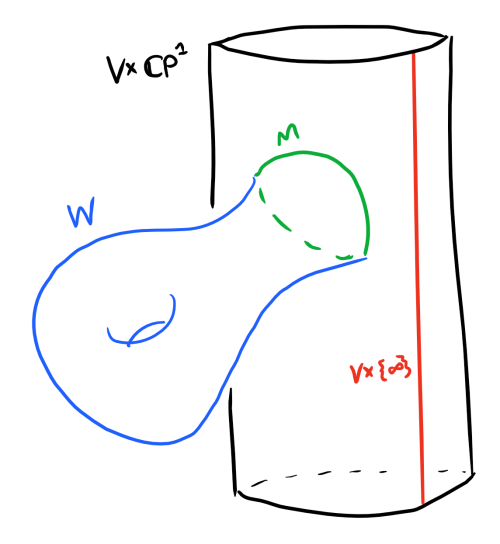
 , where
, where  is admissible (as discussed in the previous section) for
is admissible (as discussed in the previous section) for  such that
such that ![[u] = [\{v\} \times \mathbb{C}P^1]](https://s0.wp.com/latex.php?latex=%5Bu%5D+%3D+%5B%5C%7Bv%5C%7D+%5Ctimes+%5Cmathbb%7BC%7DP%5E1%5D&bg=ffffff&fg=333333&s=0&c=20201002) (for some
(for some  ,
,  , and
, and  , for some choice of
, for some choice of  distinct and not
distinct and not  .
. .
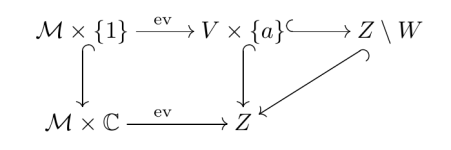
. . First of all,
. First of all,  . This map is actually proper and degree 1, which follows from the maximum principles just described, plus a little boost from positivity of intersection which implies that there is no need to worry about stable maps in the compactification of
. This map is actually proper and degree 1, which follows from the maximum principles just described, plus a little boost from positivity of intersection which implies that there is no need to worry about stable maps in the compactification of  .
.
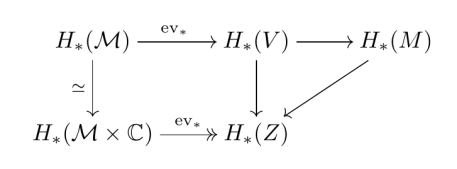
 which is right inverse to
which is right inverse to  on the level of homology).
on the level of homology). . Given an almost complex manifold, a J-holomorphic curve is a map
. Given an almost complex manifold, a J-holomorphic curve is a map  such that
such that  is a Riemann surface and
is a Riemann surface and  . In the case where
. In the case where  is a complex manifold, we see this is precisely what it means to be holomorphic.
is a complex manifold, we see this is precisely what it means to be holomorphic. . By this, we mean that the (0,2)-tensor
. By this, we mean that the (0,2)-tensor  is a Riemannian metric. We say
is a Riemannian metric. We say  for each nonzero vector
for each nonzero vector  factors as
factors as  such that the first map is a branched cover of Riemann surfaces. J-holomorphic curves which are not multiply covered are called simple, and it turns out that simple curves are characterized by being somewhere injective, meaning there is some
such that the first map is a branched cover of Riemann surfaces. J-holomorphic curves which are not multiply covered are called simple, and it turns out that simple curves are characterized by being somewhere injective, meaning there is some  for which
for which  and
and  . Even better, somewhere injective means that
. Even better, somewhere injective means that  is almost everywhere injective.
is almost everywhere injective. the moduli space of all simple
the moduli space of all simple ![u_*[\Sigma]](https://s0.wp.com/latex.php?latex=u_%2A%5B%5CSigma%5D&bg=ffffff&fg=333333&s=0&c=20201002) of the map
of the map  to some
to some  . The main question is:
. The main question is: actually a smooth manifold?
actually a smooth manifold? , where
, where  .
. where
where  is a biholomorphism. A more careful author would probably distinguish between the map
is a biholomorphism. A more careful author would probably distinguish between the map  by reparametrization to obtain moduli spaces of curves. Usually, these are the main objects of interest.
by reparametrization to obtain moduli spaces of curves. Usually, these are the main objects of interest. has an energy
has an energy  attached to it (when
attached to it (when  given by
given by  . We see that away from
. We see that away from  , this is just converging to the curve
, this is just converging to the curve  . But near
. But near  , if we reparametrize the domain by
, if we reparametrize the domain by  , we see this converges to the sphere
, we see this converges to the sphere  .
. given by
given by  , in which a new bubble forms at
, in which a new bubble forms at  in addition to the one discussed above. More generally, a sequence of curves can limit to a curve with trees of bubbles sticking out.
in addition to the one discussed above. More generally, a sequence of curves can limit to a curve with trees of bubbles sticking out.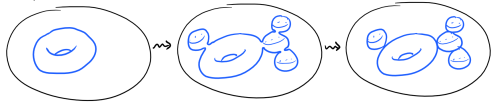
 (modulo reparametrization of domain) can be compactified by adding in stable curves of total energy bounded by
(modulo reparametrization of domain) can be compactified by adding in stable curves of total energy bounded by  in the homology class
in the homology class  is the group of biholomorphisms of
is the group of biholomorphisms of  . Then the group
. Then the group  by
by  . Notice then that the evaluation map
. Notice then that the evaluation map  only depends on the orbit, and hence descends to a map
only depends on the orbit, and hence descends to a map  . Proving enough properties of such an evaluation map sometimes allows us to compare the smooth topology of
. Proving enough properties of such an evaluation map sometimes allows us to compare the smooth topology of  is a simple J-holomorphic curve representing the class
is a simple J-holomorphic curve representing the class  with geometric self-intersection number
with geometric self-intersection number  , then
, then .
. , such that the so-called characteristic foliation
, such that the so-called characteristic foliation  on
on  , which is actually a singular foliation, looks like the following image, with one singular point in the center and a closed leaf as boundary.
, which is actually a singular foliation, looks like the following image, with one singular point in the center and a closed leaf as boundary.
 . We study the space of certain J-holomorphic disks with boundary on the overtwisted disk. The key is that a neighborhood of the overtwisted disk
. We study the space of certain J-holomorphic disks with boundary on the overtwisted disk. The key is that a neighborhood of the overtwisted disk  , with its standard contact structure given by the complex tangencies, i.e.
, with its standard contact structure given by the complex tangencies, i.e.  , with
, with  . Then consider the disk given by
. Then consider the disk given by  . The characteristic foliation on this disk looks like the characteristic foliation near the center of the overtwisted disk, so a neighborhood of this disk in
. The characteristic foliation on this disk looks like the characteristic foliation near the center of the overtwisted disk, so a neighborhood of this disk in  yields a model for a neighborhood of the center of the overtwisted disk. We may assume the almost complex structure in this neighborhood is just given by the standard one,
yields a model for a neighborhood of the center of the overtwisted disk. We may assume the almost complex structure in this neighborhood is just given by the standard one,  for
for  a real constant near 0. That these are all of the somewhere injective disks is a relatively easy exercise in analysis. Namely, suppose we had such a disk of the form
a real constant near 0. That these are all of the somewhere injective disks is a relatively easy exercise in analysis. Namely, suppose we had such a disk of the form  . Then since boundary points are mapped to the overtwisted disk,
. Then since boundary points are mapped to the overtwisted disk,  . But each component of
. But each component of  is harmonic, hence satisfies a maximum principle. Therefore,
is harmonic, hence satisfies a maximum principle. Therefore,  . But by holomorphicity,
. But by holomorphicity,  is real, so we can draw this situation in
is real, so we can draw this situation in  by forgetting the imaginary part of
by forgetting the imaginary part of 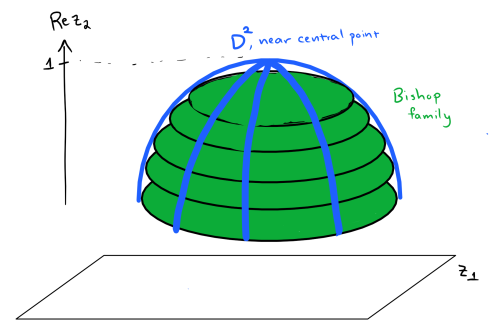
 . This is by a maximum principle which comes from analytic convexity properties of a filled contact manifold.
. This is by a maximum principle which comes from analytic convexity properties of a filled contact manifold. . But one checks that the relation
. But one checks that the relation  implies that for a
implies that for a  , we have
, we have  . This vanishes by Stokes’ Theorem since
. This vanishes by Stokes’ Theorem since  is exact, and so
is exact, and so  such that
such that  is a smooth closed symplectic 4-manifold and
is a smooth closed symplectic 4-manifold and  . We call a rational curve
. We call a rational curve  with respect to the intersection product on
with respect to the intersection product on  (with respect to its orientation coming from
(with respect to its orientation coming from  contains no exceptional curves. The main theorem is as follows:
contains no exceptional curves. The main theorem is as follows: , then
, then  , in which case
, in which case  is an integer. Let us first define this contact structure. Recall that the standard contact structure on
is an integer. Let us first define this contact structure. Recall that the standard contact structure on  where the action of
where the action of  given by
given by  preserves the contact structure, so that it descends.
preserves the contact structure, so that it descends. , these fillings are unique up to diffeomorphism, and further up to symplectomorphism upon fixing the cohomology class
, these fillings are unique up to diffeomorphism, and further up to symplectomorphism upon fixing the cohomology class ![[\omega]](https://s0.wp.com/latex.php?latex=%5B%5Comega%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The space
. The space  has two nondiffeomorphic minimal fillings.
has two nondiffeomorphic minimal fillings. over
over  for any such given
for any such given ![[C]](https://s0.wp.com/latex.php?latex=%5BC%5D&bg=ffffff&fg=333333&s=0&c=20201002) can be represented by a
can be represented by a  , where:
, where:![A_i := [S_i]](https://s0.wp.com/latex.php?latex=A_i+%3A%3D+%5BS_i%5D&bg=ffffff&fg=333333&s=0&c=20201002) is
is  must actually be a legitimate curve of one component)
must actually be a legitimate curve of one component) are distinct and embedded curves of self-intersection -1, 0, or 1, with at least one index for which
are distinct and embedded curves of self-intersection -1, 0, or 1, with at least one index for which  .
. and
and  , then it had already been shown that this implies that
, then it had already been shown that this implies that  . This bleeds into…
. This bleeds into… consisting of simple holomorphic spheres representing the class
consisting of simple holomorphic spheres representing the class ![A = [S]](https://s0.wp.com/latex.php?latex=A+%3D+%5BS%5D&bg=ffffff&fg=333333&s=0&c=20201002) . This comes with an evaluation map of the form
. This comes with an evaluation map of the form
 and we have positivity of intersection. Therefore, this map has degree 1, and so any pair of distinct points on
and we have positivity of intersection. Therefore, this map has degree 1, and so any pair of distinct points on  is a simple homology class in
is a simple homology class in  , and suppose
, and suppose  with symplectic fibers and such that
with symplectic fibers and such that  of rational embedded
of rational embedded  , and where
, and where ![d = \dim V + 2c_1(TV) \cdot [C] - 4](https://s0.wp.com/latex.php?latex=d+%3D+%5Cdim+V+%2B+2c_1%28TV%29+%5Ccdot+%5BC%5D+-+4&bg=ffffff&fg=333333&s=0&c=20201002) ,
, fixing the marked point. Applying adjunction for the curve represented by
fixing the marked point. Applying adjunction for the curve represented by ![[C] \cdot [C] = 0](https://s0.wp.com/latex.php?latex=%5BC%5D+%5Ccdot+%5BC%5D+%3D+0&bg=ffffff&fg=333333&s=0&c=20201002) , yields
, yields  . We also have an evaluation map
. We also have an evaluation map
 where the fibers are precisely the curves in our moduli space. Since the fibers are holomorphic, they are symplectic by the taming condition.
where the fibers are precisely the curves in our moduli space. Since the fibers are holomorphic, they are symplectic by the taming condition. has a structure group which can be reduced to
has a structure group which can be reduced to  , but the complex bordism group is well known to satisfy
, but the complex bordism group is well known to satisfy  . As a consequence, every contact manifold is smoothly fillable. We must therefore consider fillability questions which extend beyond the realm of complex bordism in order to discover interesting phenomena.
. As a consequence, every contact manifold is smoothly fillable. We must therefore consider fillability questions which extend beyond the realm of complex bordism in order to discover interesting phenomena. such that
such that  . There is a generalization in higher dimensions due to
. There is a generalization in higher dimensions due to  is
is  such that one can find a Liouville vector field
such that one can find a Liouville vector field  gives a (properly cooriented) contact form for
gives a (properly cooriented) contact form for  where
where  .
. and
and  fits into an exact triangle with Morse homology, and so one can understand the topology of a filling from its symplectic homology. One might be interested, for example, in studying fillings with
fits into an exact triangle with Morse homology, and so one can understand the topology of a filling from its symplectic homology. One might be interested, for example, in studying fillings with  , in which case the homology of the filling is completely determined by
, in which case the homology of the filling is completely determined by  ).
).  from
from  . An L-space is a rational homology three-sphere for which equality holds.
. An L-space is a rational homology three-sphere for which equality holds. ? Experiment! (Ditto for knots, links, and their invariants.)
? Experiment! (Ditto for knots, links, and their invariants.) for some
for some  .
. where
where  is the length of the candidate braid. The algorithm is not yet implementable because it relies on knowledge of a function
is the length of the candidate braid. The algorithm is not yet implementable because it relies on knowledge of a function  where
where  is naturally symplectic: the cotangent bundle of
is naturally symplectic: the cotangent bundle of  for any one-form
for any one-form  ; the pullback is along the canonical projection
; the pullback is along the canonical projection  . The form
. The form  . (This is not a vector bundle!) The form
. (This is not a vector bundle!) The form  are contactomorphic
are contactomorphic . You can think of it as the boundary of the normal bundle to
. You can think of it as the boundary of the normal bundle to  is
is  then
then  is Legendrian isotopic to
is Legendrian isotopic to  .
. on the spectral sequence?
on the spectral sequence?![\mathbb{Z}[U]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BZ%7D%5BU%5D&bg=ffffff&fg=333333&s=0&c=20201002) -module $HFK^-(L)$. From this group one can extract the numerical concordance invariant $\tau(L)$. Defining
-module $HFK^-(L)$. From this group one can extract the numerical concordance invariant $\tau(L)$. Defining  over
over ![\mathbb{Q}[U]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BQ%7D%5BU%5D&bg=ffffff&fg=333333&s=0&c=20201002) or
or ![\mathbb{Z}/p\mathbb{Z}[U]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BZ%7D%2Fp%5Cmathbb%7BZ%7D%5BU%5D&bg=ffffff&fg=333333&s=0&c=20201002) one can define invariants
one can define invariants  and
and  .
. ?
? ? (From a purely algebraic perspective, a “no” to the first question suggests a “no” to this one.)
? (From a purely algebraic perspective, a “no” to the first question suggests a “no” to this one.) of any link. Speaking of which,
of any link. Speaking of which, . These were constructed from link Floer homology by
. These were constructed from link Floer homology by  summand, but their fibers are not the same:
summand, but their fibers are not the same:  for all t and
for all t and  .
. by
by  ?
?

 is independent of the
is independent of the  is well-defined and satisfies
is well-defined and satisfies  so there is a genuine contact annulus extending the contact structure from the boundary of the circle model for
so there is a genuine contact annulus extending the contact structure from the boundary of the circle model for  .
. on the cylinder
on the cylinder  which is negative on the region where
which is negative on the region where  and
and  , and which increases linearly from 0 in
, and which increases linearly from 0 in  of
of  with the standard contact form, into the boundary sum of
with the standard contact form, into the boundary sum of  is less than the connected sum of
is less than the connected sum of  , we can fill in the holes by genuine contact structures.
, we can fill in the holes by genuine contact structures. must dominate (is greater than) some special Hamiltonian for sufficiently small
must dominate (is greater than) some special Hamiltonian for sufficiently small  , such that for any
, such that for any  , every hole dominates a circle model for a special
, every hole dominates a circle model for a special ![z\in[1-\varepsilon,1]](https://s0.wp.com/latex.php?latex=z%5Cin%5B1-%5Cvarepsilon%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) . Therefore we do not need the full annulus (neighborhood the boundary of the cylinder), only the topological disk obtained but cutting off the end of the cylinder.
. Therefore we do not need the full annulus (neighborhood the boundary of the cylinder), only the topological disk obtained but cutting off the end of the cylinder. such that for a special Hamiltonian
such that for a special Hamiltonian  (where here
(where here  denotes the boundary sum obtained by tubing the two cylinders together so that the contact Hamiltonian is positive on the tube). For the parametric version, the main lemma shows there is a family
denotes the boundary sum obtained by tubing the two cylinders together so that the contact Hamiltonian is positive on the tube). For the parametric version, the main lemma shows there is a family  interpolating between the identity and
interpolating between the identity and  at the cost of correspondingly shrinking/expanding
at the cost of correspondingly shrinking/expanding  . The effect on the contact Hamiltonian is
. The effect on the contact Hamiltonian is  .
. if you allow the angular
if you allow the angular  directions to be twisted. The effect on the contact Hamiltonian if we ignore the angular coordinate is
directions to be twisted. The effect on the contact Hamiltonian if we ignore the angular coordinate is  .
. . Since we don’t want to mess with the contact structure on the
. Since we don’t want to mess with the contact structure on the  when
when  , by choosing
, by choosing  . The total effect of composing these two maps is an embedding
. The total effect of composing these two maps is an embedding  mapping
mapping  (the angular directions get twisted some amount but we don’t care).
(the angular directions get twisted some amount but we don’t care).  , so that the points where
, so that the points where  are sent to points where
are sent to points where  are sent to points with
are sent to points with  . So this contactomorphism inflates the cylinder in the
. So this contactomorphism inflates the cylinder in the  starting with a basic translation we get a family of embeddings
starting with a basic translation we get a family of embeddings  which look like this:
which look like this:

 .
. , i.e. the Hamiltonian is basically fixed to be standard on these ends. When we reach
, i.e. the Hamiltonian is basically fixed to be standard on these ends. When we reach  , the ends of
, the ends of  coincide with the ends of
coincide with the ends of  so in these regions
so in these regions  .
.
 is always greater than or equal to 1, so the region where
is always greater than or equal to 1, so the region where  is the image under
is the image under  and similarly
and similarly  . Since we can use the disorder lemma, we don’t care much about the exact negative values of
. Since we can use the disorder lemma, we don’t care much about the exact negative values of  , but we do need
, but we do need  wherever
wherever  . Therefore we need to check this inequality on points
. Therefore we need to check this inequality on points  where
where ![u\in [1-\varepsilon,1]](https://s0.wp.com/latex.php?latex=u%5Cin+%5B1-%5Cvarepsilon%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and 
 , and the value
, and the value  so in this region
so in this region  compares to
compares to  like this:
like this:
 wherever
wherever  . Then we can use the disorder lemma to produce a contactomorphism which fixes everything on this positive region but makes the Hamiltonian sufficiently negative in the region where
. Then we can use the disorder lemma to produce a contactomorphism which fixes everything on this positive region but makes the Hamiltonian sufficiently negative in the region where  so that after composing
so that after composing  as required. Notice that
as required. Notice that  with a 2-dimensional disk
with a 2-dimensional disk 
 on
on  , recall that an extension of this function
, recall that an extension of this function  defines an almost contact structure
defines an almost contact structure  on
on  which is genuinely contact wherever
which is genuinely contact wherever  (compute
(compute  ). Using the conventions from the BEM paper, we will use the coordinate
). Using the conventions from the BEM paper, we will use the coordinate  . If
. If 

 is positive. Then define
is positive. Then define .
. to
to  near the boundary. However, because the polar coordinates degenerate near
near the boundary. However, because the polar coordinates degenerate near  , in a neighborhood of
, in a neighborhood of  to interpolate between these two, and then define the almost contact structure on
to interpolate between these two, and then define the almost contact structure on  by the form
by the form  . We want this almost contact form to be genuinely contact near the boundary since we are looking for a model for the holes. You can compute
. We want this almost contact form to be genuinely contact near the boundary since we are looking for a model for the holes. You can compute  to see that
to see that  defines a genuine contact form exactly when
defines a genuine contact form exactly when  . The boundary of the ball
. The boundary of the ball  and the piece where
and the piece where  . In a neighborhood of the former piece,
. In a neighborhood of the former piece,  so it has positive derivative, but on the latter piece we have to impose the condition directly that
so it has positive derivative, but on the latter piece we have to impose the condition directly that  in an open neighborhood of points where
in an open neighborhood of points where  .
. which satisfy these conditions do not yield genuinely different almost contact forms
which satisfy these conditions do not yield genuinely different almost contact forms  because up to diffeomorphism, different choices do not change the contact structure near the boundary or the relative homotopy type of the almost contact structure on the interior.
because up to diffeomorphism, different choices do not change the contact structure near the boundary or the relative homotopy type of the almost contact structure on the interior. says how much the almost contact planes are rotating in the radial direction, and if
says how much the almost contact planes are rotating in the radial direction, and if  this means the twisting has stopped. If
this means the twisting has stopped. If  is negative then since
is negative then since  and
and  near 0,
near 0,  near points where
near points where 
 on
on  and
and  such that
such that  and
and  , then it is not hard to see that we can choose circle models for each such that
, then it is not hard to see that we can choose circle models for each such that  embeds into
embeds into  and so that
and so that  in a neighborhood of the entire region where
in a neighborhood of the entire region where  . In other words, the almost contact structure is contact and twisting in the standard way along the radial direction on the region between
. In other words, the almost contact structure is contact and twisting in the standard way along the radial direction on the region between  but at others
but at others  ), then there may be a different contact Hamiltonian
), then there may be a different contact Hamiltonian  which corresponds to the same contact germ in different coordinates such that
which corresponds to the same contact germ in different coordinates such that  , we want to construct an induced contactomorphism on
, we want to construct an induced contactomorphism on  . Because contactomorphisms only preserve the contact planes, and not the contact form, a contactomorphism
. Because contactomorphisms only preserve the contact planes, and not the contact form, a contactomorphism  satisfies
satisfies  where
where  is a positive real valued function on
is a positive real valued function on  to give a contact form for the same contact structure. Therefore define
to give a contact form for the same contact structure. Therefore define  by
by  .
. defined by
defined by  for any family of functions
for any family of functions  . If
. If  defines the contact structure on the image
defines the contact structure on the image  then
then
 .
. ? This is to allow us to reparameterize
? This is to allow us to reparameterize  so that it satisfies the required conditions to define the circular model (should look like the identity near
so that it satisfies the required conditions to define the circular model (should look like the identity near  ). Before the contactomorphism, to define the circular model, you choose a constant
). Before the contactomorphism, to define the circular model, you choose a constant ![[0, K(x,\theta)+C]](https://s0.wp.com/latex.php?latex=%5B0%2C+K%28x%2C%5Ctheta%29%2BC%5D&bg=ffffff&fg=333333&s=0&c=20201002) and is required to have certain behavior near the endpoints of this interval. After rescaling, we have a new Hamiltonian
and is required to have certain behavior near the endpoints of this interval. After rescaling, we have a new Hamiltonian  so that
so that  . Then we consider
. Then we consider  on the interval
on the interval ![[0,c_{\Phi}(x)K(x,\theta)+\widetilde{C}]](https://s0.wp.com/latex.php?latex=%5B0%2Cc_%7B%5CPhi%7D%28x%29K%28x%2C%5Ctheta%29%2B%5Cwidetilde%7BC%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) and require it to have particular behavior near
and require it to have particular behavior near  . Because
. Because  , modifying the functions
, modifying the functions ![[0,c_{\Phi}(x)K(x,\theta)]](https://s0.wp.com/latex.php?latex=%5B0%2Cc_%7B%5CPhi%7D%28x%29K%28x%2C%5Ctheta%29%5D&bg=ffffff&fg=333333&s=0&c=20201002) so that
so that  in the sense that
in the sense that  , then you can compute that
, then you can compute that  .
. be a subset containing the piece where
be a subset containing the piece where  for the contact form defined by
for the contact form defined by  is a positive function with very tiny values close to 0, for
is a positive function with very tiny values close to 0, for  . The more
. The more  for
for  which rescale in certain directions. Choose cylindrical coordinates
which rescale in certain directions. Choose cylindrical coordinates  on
on  and let
and let  so
so  .
. is defined by a diffeomorphism
is defined by a diffeomorphism  . You can check directly that this diffeomorphism is a contactomorphism which rescales the standard contact form by
. You can check directly that this diffeomorphism is a contactomorphism which rescales the standard contact form by 
 directions.
directions. allows you to rescale the radial directions
allows you to rescale the radial directions  get sent to points where
get sent to points where  since
since  . The rescaling factor for the contact form is
. The rescaling factor for the contact form is  , so the contact Hamiltonian is rescaled accordingly. For positive functions
, so the contact Hamiltonian is rescaled accordingly. For positive functions  , setting
, setting  gives
gives  to the region where
to the region where  . Therefore twist embeddings allow you to modify the radial directions however you want to, with basically no cost (just twisting the angular directions).
. Therefore twist embeddings allow you to modify the radial directions however you want to, with basically no cost (just twisting the angular directions). . Its characteristic foliation (defined by the intersection of the tangent space and the contact distribution) has two elliptic singular points in the north and south poles and all the leaves are open intervals connecting the north and the south pole. Take a transversal segment I=[0,1] connecting the poles (a vertical segment will do). Given a point in the segment we can consider the unique leaf through that point and move around the leaf until we hit the interval I=[0,1] again. This defines a diffeomorphism of the interval [0,1] fixed at the endpoints. We will call this diffeomorphism the monodromy of the foliation (and note that conversely any diffeomorphism will give a foliation on the 2–sphere via a mapping torus construction and collapsing the boundary). This is drawn in the following figure:
. Its characteristic foliation (defined by the intersection of the tangent space and the contact distribution) has two elliptic singular points in the north and south poles and all the leaves are open intervals connecting the north and the south pole. Take a transversal segment I=[0,1] connecting the poles (a vertical segment will do). Given a point in the segment we can consider the unique leaf through that point and move around the leaf until we hit the interval I=[0,1] again. This defines a diffeomorphism of the interval [0,1] fixed at the endpoints. We will call this diffeomorphism the monodromy of the foliation (and note that conversely any diffeomorphism will give a foliation on the 2–sphere via a mapping torus construction and collapsing the boundary). This is drawn in the following figure:
 , where c is a small positive constant, in the overtwisted contact manifold
, where c is a small positive constant, in the overtwisted contact manifold  . The overtwisted monodromy is drawn in the next figure:
. The overtwisted monodromy is drawn in the next figure:

 in
in  ). If we restrict to the sphere
). If we restrict to the sphere  we can write H in terms of
we can write H in terms of  at points where the implicit function theorem works. Then the characteristic foliation is nothing else than the solution of the time–dependent (x is the time) differential equation
at points where the implicit function theorem works. Then the characteristic foliation is nothing else than the solution of the time–dependent (x is the time) differential equation  on the interval I=[-1,1] given by the coordinate z. Hence the contact Hamiltonian yields the ODE to which the monodromy is a solution.
on the interval I=[-1,1] given by the coordinate z. Hence the contact Hamiltonian yields the ODE to which the monodromy is a solution. with a given characteristic foliation ?
with a given characteristic foliation ? restricts to the graph of H in
restricts to the graph of H in  as
as  .
.



 in a 3–fold (which is given by Gromov’s h–principle, see previous posts) and that the characteristic foliation on the boundary
in a 3–fold (which is given by Gromov’s h–principle, see previous posts) and that the characteristic foliation on the boundary  has monodromy with fixed points (h stands for hole). Can we extend the contact structure ?
has monodromy with fixed points (h stands for hole). Can we extend the contact structure ? somewhere inside the manifold with an overtwisted monodromy (in blue, see above) in its characteristic foliation. Consider the annulus
somewhere inside the manifold with an overtwisted monodromy (in blue, see above) in its characteristic foliation. Consider the annulus  . Use the south poles of
. Use the south poles of  and
and  are drawn in pink (exterior boundary) and blue (interior boundary). The monodromy in green is that of
are drawn in pink (exterior boundary) and blue (interior boundary). The monodromy in green is that of  yields a sphere with the monodromy green#pink (the transition area is purple, this has some relevance but it is not essential). Consider the annulus A bounded by
yields a sphere with the monodromy green#pink (the transition area is purple, this has some relevance but it is not essential). Consider the annulus A bounded by  and
and  . We have reduced the problem of extending the contact structure to the interior of
. We have reduced the problem of extending the contact structure to the interior of  : in order to use the argument with the Hamiltonians we can cut the North pole of
: in order to use the argument with the Hamiltonians we can cut the North pole of  in higher dimensions 2n+1 to be the object that appears when using the contact Hamiltonian on a simplex
in higher dimensions 2n+1 to be the object that appears when using the contact Hamiltonian on a simplex  given by
given by

{kind=link}