Eliashberg proved that overtwisted contact structures up to isotopy are classified by their homotopy class in the space of 2-plane distributions in a 1989 paper. The higher dimensional case shares some similar structural aspects to the proof in 3 dimensions, so it seems worth going through the original result. I will try to mention the relations with the higher dimensional proof throughout. My sources here are Eliashberg’s original paper (Inventiones 1989), and the explanation of the proof in Geiges’ Introduction to Contact Topology book in section 4.7.
Starting at the beginning: an overtwisted disk in a contact 3-manifold is an embedding of the disk  where the contact structure on
where the contact structure on  is the kernel of
is the kernel of  . In dimension 3, we can alternatively define an overtwisted disk as an embedded disk whose boundary is Legendrian (tangent to the contact planes), such that the framing given by the contact planes agrees with the framing given by the surface. The existence of an overtwisted disk by one definition implies the existence of an overtwisted disk by the other definition, so we say a contact structure is overtwisted if it contains an overtwisted disk (using either definition).
. In dimension 3, we can alternatively define an overtwisted disk as an embedded disk whose boundary is Legendrian (tangent to the contact planes), such that the framing given by the contact planes agrees with the framing given by the surface. The existence of an overtwisted disk by one definition implies the existence of an overtwisted disk by the other definition, so we say a contact structure is overtwisted if it contains an overtwisted disk (using either definition).
The main idea is to start with a distribution, and homotope it piece by piece until it becomes a contact structure on the entire manifold. In order to extend the contact structure over the entire manifold, the existence of overtwisted disks is needed. This shows that every homotopy class contains a contact structure. In dimension 3 this followed from the work of Martinet who constructed a contact structure on each 3-manifold with surgery techniques and that of Lutz who showed that you can use Lutz twisting to modify the homotopy class of the contact structure however you want to without changing the 3-manifold. To show that any two overtwisted contact structures  and
and  which are homotopic are isotopic uses a parametric version of the extension construction. The homotopy between them gives an interpolating interval family of 2-plane distributions
which are homotopic are isotopic uses a parametric version of the extension construction. The homotopy between them gives an interpolating interval family of 2-plane distributions  , and using the same ideas, we can homotope the intermediate distributions piece by piece until they become a smooth family
, and using the same ideas, we can homotope the intermediate distributions piece by piece until they become a smooth family  of actual contact structures interpolating between and . Then by Gray’s theorem
of actual contact structures interpolating between and . Then by Gray’s theorem  and
and  are contact isotopic.
are contact isotopic.
Note: everything here can be done relative to a closed subset; namely, if the 2-plane distribution is already contact on an open neighborhood of a closed subset, the homotopies can be chosen to fix the 2-plane distribution on that closed subset. This is in fact necessary to preserve the existence of the overtwisted disk throughout the modifications of the distribution, and to preserve the contact structures which are the end points of a 1-parameter family of distributions.
In fact the parametric version of the proof can be done when the parameter space is any compact set, so this can be used to show a more general statement. Let  denote the space of overtwisted contact structures on M with a fixed overtwisted disk, and let
denote the space of overtwisted contact structures on M with a fixed overtwisted disk, and let  denote the space of 2-plane distributions which also contain the fixed overtwisted disk. Then the inclusion
denote the space of 2-plane distributions which also contain the fixed overtwisted disk. Then the inclusion  is a homotopy equivalence. (Technically, the parametric version shows that this is a weak homotopy equivalence, but the spaces are CW complexes so the Whitehead theorem implies it is a full homotopy equivalence.) The idea to reprove the extension theorem in a parametric version is also used in the higher dimensional proof.
is a homotopy equivalence. (Technically, the parametric version shows that this is a weak homotopy equivalence, but the spaces are CW complexes so the Whitehead theorem implies it is a full homotopy equivalence.) The idea to reprove the extension theorem in a parametric version is also used in the higher dimensional proof.
Now for the argument that we can homotope the distributions to genuine contact structures piece by piece (while fixing the pieces that we like already). We start with a triangulation of the manifold. We will make the distribution contact first in a neighborhood of the vertices, and then in a neighborhood of the 2-skeleton in a controlled manner, so that it will extend over the 3-cells at the end. The overtwisted disks needs to show up on the boundary of the ball that needs to be filled in at the end, so the 3-cells are all connected together with tubes and then connected to a neighborhood of the overtwisted disk. The contact condition in dimension 3 geometrically indicates whether the planes are twisting at the correct speed in the correct direction determined by the orientations. Over neighborhoods of vertices, we can easily homotope the planes to twist as much as necessary. Then we need to ensure that the planes form a contact structure over a neighborhood of the 2-skeleton, and moreover, we need to control what the contact structure looks like on the remaining boundary spheres of the 3-cells. The way to keep track of this is through the characteristic foliations.
Characteristic foliations in dimension 3 and higher
Given a surface in a contact 3-manifold, the intersection of the contact planes with the tangent planes to the surface produces a 1-dimensional singular foliation of the surface called the characteristic foliation. Equivalently, we can look at the restrictions  and
and  to the surface, and define a foliation by the vector field defined by
to the surface, and define a foliation by the vector field defined by  . Notice that such a vector field is necessarily in the kernel of the contact form, and is identically zero exactly when the contact planes are tangent to the surface (since then
. Notice that such a vector field is necessarily in the kernel of the contact form, and is identically zero exactly when the contact planes are tangent to the surface (since then  and
and  is an area form). In higher dimensions, the intersection of the contact planes with the tangent planes no longer forms an integrable distribution, but there is still a 1-dimensional singular characteristic foliation defined via the contact form in the same way. However, the characteristic foliation in higher dimensions can look considerably more complicated, and controlling its behavior takes a few additional steps than what is needed for the 3-dimensional proof.
is an area form). In higher dimensions, the intersection of the contact planes with the tangent planes no longer forms an integrable distribution, but there is still a 1-dimensional singular characteristic foliation defined via the contact form in the same way. However, the characteristic foliation in higher dimensions can look considerably more complicated, and controlling its behavior takes a few additional steps than what is needed for the 3-dimensional proof.
The characteristic foliations that we will aim for on the 2-spheres are as follows. First we want the foliation to be simple meaning it has exactly two singular points, one a source (the “north pole”) and the other a sink (the “south pole”), and all the limit cycles (closed orbits) are isolated. These limit cycles necessarily form parallels between the two poles. If additionally there is a curve running from the south pole to the north pole which is positively transverse to all of the (oriented) leaves of the foliation, then the foliation is called almost horizontal. This condition is met when all of the limit cycles are oriented from east to west when viewing the sphere as a globe and the limit cycles as lines of longitude. The benefit of the almost horizontal condition, is that the foliation is determined up to homeomorphism by a monodromy map from the interval to itself where the interval is the transverse curve, and the holonomy map is determined by flowing around the characteristic foliation once. The limit cycles correspond to fixed points of the holonomy. In the 2n+1 dimensional case, the monodromy will be a map from the 2n-1 disk to itself. In the 3-dimensional case, the homeomorphism type of the foliation is determined completely by whether the points are moved up or down the interval by the holonomy between each pair of fixed points. This is important because of the following lemma:
Lemma: Let  be a contact structure defined near the boundary of a 3-ball. The question of whether extends over the ball depends only on the topological type of the characteristic foliation induced on the boundary sphere.
be a contact structure defined near the boundary of a 3-ball. The question of whether extends over the ball depends only on the topological type of the characteristic foliation induced on the boundary sphere.
To prove the lemma, given two characteristic foliations on the sphere that are topologically equivalent, first identify the poles and limit cycles. Then show that in a small neighborhood of the boundary sphere which one of the characteristic foliations, there is another sphere which realizes the other characteristic foliation. Therefore, if the contact structure extends over the ball for the first foliation, it extends over the ball for the second.
Now we want to prove two things:
1. We can homotope the 2-plane field over a neighborhood of the 2-skeleton so that it is contact there and it induces almost horizontal characteristic foliations on the spheres which bound the remaining finitely many holes where the distribution may not yet be contact (inside the 3-cells).
2. Given a contact structure on the manifold in the complement of a collection of finitely many balls, such that the characteristic foliations are almost horizontal, and such that the contact structure contains an overtwisted disk, the balls can be connected together to each other and to the overtwisted disk so that the contact structure in a neighborhood of the resulting boundary sphere can be extended inside the resulting ball to a contact structure.
Part 1: Over the 2-skeleton, the failure of the 2-plane distribution to be contact amounts to the planes not twisting positively enough. However, we need to identify which direction we need to twist along. For this we find an auxiliary 2-dimensional foliation defined near the 2-skeleton (maybe not necessarily defined near the 0-skeleton) which is everywhere transverse to  , and is parallel to the 1-simplices (each 1 simplex is contained in a leaf), and is perpendicular to the 2-simplices. Now consider the characteristic foliation determined by on each leaf of this auxiliary foliation. The characteristic foliation is nonsingular by the transversality condition, so we can cover this neighborhood of the 2-skeleton by pieces which can be identified with a subset of with 1-dimensional foliation given by curves parallel to the y-axis. By ensuring that the 2-planes twist enough along the leaves of this 1-dimensional foliation, we can identify each of these pieces of manifold together with the 2-plane distribution with a piece of
, and is parallel to the 1-simplices (each 1 simplex is contained in a leaf), and is perpendicular to the 2-simplices. Now consider the characteristic foliation determined by on each leaf of this auxiliary foliation. The characteristic foliation is nonsingular by the transversality condition, so we can cover this neighborhood of the 2-skeleton by pieces which can be identified with a subset of with 1-dimensional foliation given by curves parallel to the y-axis. By ensuring that the 2-planes twist enough along the leaves of this 1-dimensional foliation, we can identify each of these pieces of manifold together with the 2-plane distribution with a piece of  . The idea is to twist along these “Legendrian curves” in a neighborhood of each simplex one by one, in a relative way so that we fix the parts that we have already made contact. The thing we want to avoid is at some point, one of the Legendrian curves may have two ends in the relative piece that we have already made contact and do not want to mess up. In order to avoid this, keep very close track of the angles between and the simplices and the angles between different adjacent simplices.
. The idea is to twist along these “Legendrian curves” in a neighborhood of each simplex one by one, in a relative way so that we fix the parts that we have already made contact. The thing we want to avoid is at some point, one of the Legendrian curves may have two ends in the relative piece that we have already made contact and do not want to mess up. In order to avoid this, keep very close track of the angles between and the simplices and the angles between different adjacent simplices.
A question: why is the 2-dimensional foliation chosen parallel to the 1-simplices and perpendicular to the 2-simplices? Some thoughts: this might be needed to make the Legendrian foliation consistent from the neigbhorhood of the 1-simplices to the neighborhood of the 2-simplices, or it might be needed for the Legendrian foliation to accurately capture the angle the contact planes make with the simplices.
In the parametric case where we want to keep track of the angles of a family of distributions , we simply subdivide the compact parameter space into sufficiently small pieces so that the angles between the contact planes at a fixed point but at different times in the parameter space remain sufficiently small relative to the chosen simplicial complex. Then one can make a homotopy through contact structures for t in each subinterval, and by doing everything relative to the end points, this will gradually extend across the entire parametrizing interval.
The precise details of the argument are in Geiges’ exposition, but without getting bogged down in notation, here is the idea of the angle tracking argument. First choose a very fine simplicial complex where the maximal diameter, d, of the simplices becomes very small, but the angles between simplices remains bounded above by  , and the minimum distance
, and the minimum distance  between disjoint simplices is less than some fixed constant multiplied by d. On each simplex, the amount that the angles of the contact planes change relative to each other is measured by a Gauss map from the simplex to
between disjoint simplices is less than some fixed constant multiplied by d. On each simplex, the amount that the angles of the contact planes change relative to each other is measured by a Gauss map from the simplex to  . This change can be captured by a norm, which by choosing a good enough simplicial subdivision, can be assumed to be small relative to
. This change can be captured by a norm, which by choosing a good enough simplicial subdivision, can be assumed to be small relative to  , so that across each simplex, the angle of the contact planes only changes by a very small fraction of .
, so that across each simplex, the angle of the contact planes only changes by a very small fraction of .
Eliashberg defines “special simplices” as 1- or 2-simplices which contain some point p at which  makes an angle less than
makes an angle less than  with the simplex. The other 1- and 2-simplices are considered non-special. The idea of the special simplices is that the Legendrian curves which tell you which direction to twist in, make a small angle with the simplices, whereas with the non-special simplices, the Legendrian curves are “sufficiently transverse” to the simplices that the curves will have at least one end in the 3-simplices, away from the neighborhoods of the 0-, 1-, and 2-simplices where we may have already modified to be contact. By carefully keeping track of the angles between simplices and , and between at one point versus another (using the small norm assumption from the previous paragraph), one can show with triangle inequalities that if two special simplices were adjacent, the angle between them would be less than , which is not possible. Therefore the special simplices are isolated from each other, so we will perturb the distribution to become contact along the special simplices first and not worry about whether this changes the plane field near the other adjacent simplices as we will fix them later. Once this is done, we assume that we have modified to be contact in a neighborhood of all special simplices, and in a neighborhood of any 0-simplices (vertices) which are disjoint from the special simplices. The sizes of these neighborhoods are chosen relative to the constants and . Next modify the contact structure in small neighborhoods of the non-special 1-simplices (which are not the boundary of a special 2-simplex) rel boundary (where the structure is already contact and we don’t want to modify it anymore). The angle between the non-special simplices and the Legendrian foliation curves defined by is at least
with the simplex. The other 1- and 2-simplices are considered non-special. The idea of the special simplices is that the Legendrian curves which tell you which direction to twist in, make a small angle with the simplices, whereas with the non-special simplices, the Legendrian curves are “sufficiently transverse” to the simplices that the curves will have at least one end in the 3-simplices, away from the neighborhoods of the 0-, 1-, and 2-simplices where we may have already modified to be contact. By carefully keeping track of the angles between simplices and , and between at one point versus another (using the small norm assumption from the previous paragraph), one can show with triangle inequalities that if two special simplices were adjacent, the angle between them would be less than , which is not possible. Therefore the special simplices are isolated from each other, so we will perturb the distribution to become contact along the special simplices first and not worry about whether this changes the plane field near the other adjacent simplices as we will fix them later. Once this is done, we assume that we have modified to be contact in a neighborhood of all special simplices, and in a neighborhood of any 0-simplices (vertices) which are disjoint from the special simplices. The sizes of these neighborhoods are chosen relative to the constants and . Next modify the contact structure in small neighborhoods of the non-special 1-simplices (which are not the boundary of a special 2-simplex) rel boundary (where the structure is already contact and we don’t want to modify it anymore). The angle between the non-special simplices and the Legendrian foliation curves defined by is at least  at each point. By having chosen the neighborhoods of the special simplices and 0-simplices small in terms of and the minimal distance between disjoint simplices, , we can ensure that none of the Legendrian curves through the non-special simplex hit the already contact neighborhoods in more than one end so we can twist the planes towards the end where we do not need to fix the planes.
at each point. By having chosen the neighborhoods of the special simplices and 0-simplices small in terms of and the minimal distance between disjoint simplices, , we can ensure that none of the Legendrian curves through the non-special simplex hit the already contact neighborhoods in more than one end so we can twist the planes towards the end where we do not need to fix the planes.
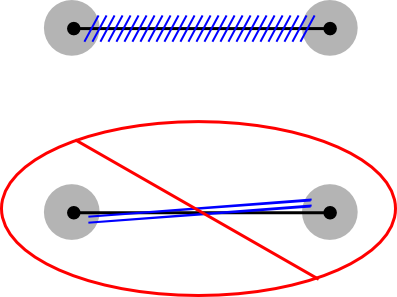
In this picture the blue curves represent the “Legendrian foliation.” The black is the non-special 1-simplex, and the grey regions are where the 2-planes have already been perturbed to be contact.
Finally, we homotope the planes in a neighborhood of the non-special 2-simplices rel boundary (since the planes are contact over the entire 1-skeleton now). Again having chosen the previous neighborhoods sufficiently small in terms of  , we can ensure that the Legendrian curves through these 2-simplices only intersect the neighborhood of the special and 1-simplices at one end so we can twist towards the free end.
, we can ensure that the Legendrian curves through these 2-simplices only intersect the neighborhood of the special and 1-simplices at one end so we can twist towards the free end.
A note about homotoping relative to a fixed closed subset: During this process, we modify the planes to be contact in certain areas and then freeze the planes there as we homotope the planes in other regions. In a similar way, if our planes were already contact in a certain region that we wanted to keep fixed from the beginning (e.g. a neighborhood of an overtwisted disk), we can do this. We just need to refine the simplicial subdivision enough near this relative set, so that we never get Legendrian curves with two ends inside the relative set.
Now we have reached a distribution which is contact in a neighborhood of the 2-skeleton, and thus in the complement of finitely many balls. We need to slightly enlargen these balls into the neighborhood of the 2-skeleton but without hitting the 2-skeleton, so that the balls are sufficiently round (they have normal curvatures bounded below by a positive constant). We can also assume some genericity of the contact structure on the boundary sphere within the roundness constraint. This together with the restrictions on the norm of the contact structure (it the planes can only twist a little bit over any simplex), ensures that the characteristic foliations on the boundaries of these enlargened balls are almost horizontal. The idea is to compare the Gauss maps along the boundary sphere of the tangent planes and the contact planes. If the characteristic foliation were not almost horizontal, the two Gauss maps, which agree at the positive singular point, would at some point become far apart (separated by angle  ), which cannot happen in these tiny simplices where does not change its angle much.
), which cannot happen in these tiny simplices where does not change its angle much.
Before going on to part 2, I want to briefly mention that in the higher dimensional version there is a part of the argument which involves keeping track of the angles of the hyperplanes relative to a foliation. There is again a distinction between pieces where the angles are sufficiently large and those that are relatively small. However, controlling the angles gets to a contact structure in the complement of balls (with a “saucer” type almost contact structure) but they do not have a sufficiently controlled characteristic foliation to fill in directly without a number of additional steps.
Part 2: At this point we have a finite set of balls in our manifold. The planes of have been homotoped to be contact in the complement of the interiors of these balls, and we have almost horizontal characteristic foliations on the boundaries. Furthermore, based on our original assumption, somewhere in the contact region is a neighborhood of an overtwisted disk, which we have fixed throughout, homotoping everything else relative to this piece. We will need to connect the almost horizontal balls to the overtwisted ball in order to fill them in. We first connect the finitely many almost horizontal balls to each other, by ordering them and then choosing a path from the north pole of one almost horizontal sphere to the south pole of the next. The connect sum of these spheres appears as the boundary of the balls together with a tiny neighborhood of the connecting path.
Note: if there is a closed set where we want to keep the contact planes fixed, we should choose our connect sum paths to avoid this set since we will modify the planes on the interior of the connected up ball.
The resulting characteristic foliation on the connect sum of all the almost horizontal spheres and the boundary of the neighborhood of the overtwisted disk is a simple foliation where there are two limit cycles oriented east to west (coming from the neighborhood of the overtwisted disk), and the rest of the limit cycles are oriented west to east (coming from the almost horizontal foliations). The standard overtwisted ball of radius  in
in  can be isotoped to a ball with boundary whose characteristic foliation is topologically equivalent to this connect sum. By the lemma mentioned before part 1, this is enough to fill in the holes. To see this isotopy consider the surfaces of revolution of smooth curves around the z-axis in in . Every time the curve intersects the line
can be isotoped to a ball with boundary whose characteristic foliation is topologically equivalent to this connect sum. By the lemma mentioned before part 1, this is enough to fill in the holes. To see this isotopy consider the surfaces of revolution of smooth curves around the z-axis in in . Every time the curve intersects the line  , we obtain an extra limit cycle. The orientation of the limit cycle (east to west or west to east) is determined as follows. The characteristic foliation is generated by a vector field
, we obtain an extra limit cycle. The orientation of the limit cycle (east to west or west to east) is determined as follows. The characteristic foliation is generated by a vector field  defined by $laetx \iota_X\Omega=\alpha$ (where is restricted to the surface and is a positive area form on the surface). Therefore if we pair with a vector in the tangent plane to the surface which has a positive Reeb component, we obtain a positively oriented basis for the surface. The sphere surface is oriented as the boundary of the ball, so the outward normal to the sphere, followed by $X$ followed by a vector with a positive Reeb component forms a positive basis for . The Reeb vector field coorients the tangent planes, and points in the negative z direction at , so vectors with a negative z component have a positive Reeb component.
defined by $laetx \iota_X\Omega=\alpha$ (where is restricted to the surface and is a positive area form on the surface). Therefore if we pair with a vector in the tangent plane to the surface which has a positive Reeb component, we obtain a positively oriented basis for the surface. The sphere surface is oriented as the boundary of the ball, so the outward normal to the sphere, followed by $X$ followed by a vector with a positive Reeb component forms a positive basis for . The Reeb vector field coorients the tangent planes, and points in the negative z direction at , so vectors with a negative z component have a positive Reeb component.

In this picture, the red vectors lie in the plane and are outward normals to the surface of revolution. The vector field generating the characteristic foliation on the limit cycles are pointing either directly in or out of the plane as indicated by the blue words. The green vector fields each have a negative z component and thus have a positive Reeb component. Observe that red, blue, green gives a positive basis for at each of these points. Furthermore notice that each limit cycle oriented by blue going out is moving east to west (there are two of these), and each limit cycle oriented by glue going in is moving west to east so we can create any number of these by creating intersections of the curve with on the “inside” of the curve. To make an odd number of limit cycles, have the curve intersect at a tangency on the inside.
This completes the 3-dimensional argument to homotope 2-plane fields containing an overtwisted disk to a contact structure. By doing this for an interval family of contact structures rel end points, we get that a family of overtwisted 2-plane fields can be homotoped to an isotopy of overtwisted contact structures.
Step 2 in the higher dimensional proof of Borman, Eliashberg and Murphy is somewhat different. First of all, one needs to establish more clearly what the necessary boundary structure of the balls is through an explicit model. The amount of flexibility in this model is not quite as much as the topological equivalence of characteristic foliations on spheres. Once the boundary model is established, each of the spheres is connect-summed to a neighborhood of an overtwisted disk (though they are not connected summed to each other, instead a bunch of copies of overtwisted disks are used, one for each hole). Then, using some contactomorphisms and various lemmas, it is possible to show that these connect sums of holes which have model contact structures on their boundaries with neighborhoods of overtwisted disks can be filled in with a contact ball. The filling of the holes is not as explicit as the surface of rotation model above in the 3-dimensional case. More on the higher dimensional case coming in later posts.















































 ), one can formally replace the derivatives of the variables with independent formal variables (i.e.
), one can formally replace the derivatives of the variables with independent formal variables (i.e.  for a 2-form
for a 2-form  ). Solving this new problem where the derivatives are replaced by independent formal variables is purely an algebraic topology problem. If the algebraic topology problem has no solution then certainly the partial differential relation has no solution. However, it is generally surprising when the converse holds: namely, the existence of a solution to the algebraic problem implies the existence of a solution of the partial differential relation. A theorem that proves this type of statement is referred to as an h-principle.
). Solving this new problem where the derivatives are replaced by independent formal variables is purely an algebraic topology problem. If the algebraic topology problem has no solution then certainly the partial differential relation has no solution. However, it is generally surprising when the converse holds: namely, the existence of a solution to the algebraic problem implies the existence of a solution of the partial differential relation. A theorem that proves this type of statement is referred to as an h-principle. , is a bundle
, is a bundle  where the fiber over
where the fiber over  consists of sections of X defined over a neighborhood of p up to an equivalence which equates sections that agree up to 1st order near p. (The r-jet bundle is defined similarly where you equate sections which agree up to rth order, but here we will only need the 1-jet bundle.) A section of
consists of sections of X defined over a neighborhood of p up to an equivalence which equates sections that agree up to 1st order near p. (The r-jet bundle is defined similarly where you equate sections which agree up to rth order, but here we will only need the 1-jet bundle.) A section of  : for each
: for each  ,
,  where
where  is a point in the fiber
is a point in the fiber  , and
, and  specifies the first partial derivatives of a function at that point. However, even though the section is smooth,
specifies the first partial derivatives of a function at that point. However, even though the section is smooth,  . A holonomic section of a 1-jet space is one where this linear variation specified by
. A holonomic section of a 1-jet space is one where this linear variation specified by 
 , so sections of the bundle are 1-forms. Sections of the 1-jet space keep track of two coordinates: the pointwise values of the underlying 1-form and its formal linear variation. Locally,
, so sections of the bundle are 1-forms. Sections of the 1-jet space keep track of two coordinates: the pointwise values of the underlying 1-form and its formal linear variation. Locally,  is a trivial bundle, and a section is just the graph of a function on
is a trivial bundle, and a section is just the graph of a function on  . Modding out by the equivalence relation, we get that for a section
. Modding out by the equivalence relation, we get that for a section  ,
,  keeps track of the point
keeps track of the point  , a point in
, a point in  and an n by n matrix at that point which specifies the formal first partial derivatives of a graph in that equivalence class (where n is the dimension of V). Symmetrizing this matrix (
and an n by n matrix at that point which specifies the formal first partial derivatives of a graph in that equivalence class (where n is the dimension of V). Symmetrizing this matrix ( ), gives the coefficients for a 2-form. When the section of
), gives the coefficients for a 2-form. When the section of  is a holonomic section, this 2-form built from the 1st order information of the section, is the exterior derivative of the 1-form which gives the 0th order information of the section. Given any pair
is a holonomic section, this 2-form built from the 1st order information of the section, is the exterior derivative of the 1-form which gives the 0th order information of the section. Given any pair  of a 1-form and a 2-form, there is a section of
of a 1-form and a 2-form, there is a section of  . For holonomic sections, this process gives a pair
. For holonomic sections, this process gives a pair  where
where  . A section of the 1-jet space is given by specifying the pointwise data and a formal 1st derivative. An example of a section has pointwise data given by the graph of
. A section of the 1-jet space is given by specifying the pointwise data and a formal 1st derivative. An example of a section has pointwise data given by the graph of  , and formal derivative specified as 0 (horizontal lines at each point). To approximate this by a holonomic section, we would need to find a function g whose pointwise values only differ from those of
, and formal derivative specified as 0 (horizontal lines at each point). To approximate this by a holonomic section, we would need to find a function g whose pointwise values only differ from those of  , and whose derivative only differs from zero by
, and whose derivative only differs from zero by 
 be a polyhedrong of codimension at least 1 and suppose we have a section of the jet bundle defined over a neighborhood of A. Then for any
be a polyhedrong of codimension at least 1 and suppose we have a section of the jet bundle defined over a neighborhood of A. Then for any  , there is a
, there is a  of A (measured in the
of A (measured in the  topology), and a holonomic section defined in a smaller neighborhood of
topology), and a holonomic section defined in a smaller neighborhood of  which is
which is  on the open manifold V of dimension n. In order to use this theorem to prove Gromov’s theorem, we must identify a good codimension 1 subset of our open manifold V, where we can use holonomic approximation to find a genuine contact structure on a neighborhood of this subset which is
on the open manifold V of dimension n. In order to use this theorem to prove Gromov’s theorem, we must identify a good codimension 1 subset of our open manifold V, where we can use holonomic approximation to find a genuine contact structure on a neighborhood of this subset which is  which is very close to
which is very close to  . By choosing our
. By choosing our  ). Therefore the holonomic approximation theorem implies we can homotope our almost contact structure to be contact on a neighborhood of the perturbed S.
). Therefore the holonomic approximation theorem implies we can homotope our almost contact structure to be contact on a neighborhood of the perturbed S. is the end of the deformation retraction which sends V into the neighborhood of S where the almost contact structure is now genuinely contact, then
is the end of the deformation retraction which sends V into the neighborhood of S where the almost contact structure is now genuinely contact, then  pulls back the almost contact structure on V to a genuine contact structure on V. The deformation retraction provides a homotopy between the almost contact structure which is contact on the neighborhood of S to the genuine contact structure coming from this pullback. Therefore concatenating the homotopy provided by the holonomic approximation theorem with the homotopy provided by the deformation retract, gives a homotopy from our original almost contact structure to an actual contact structure on V.
pulls back the almost contact structure on V to a genuine contact structure on V. The deformation retraction provides a homotopy between the almost contact structure which is contact on the neighborhood of S to the genuine contact structure coming from this pullback. Therefore concatenating the homotopy provided by the holonomic approximation theorem with the homotopy provided by the deformation retract, gives a homotopy from our original almost contact structure to an actual contact structure on V.

 on M. As we have seen, this data gives rise to the associated bundle
on M. As we have seen, this data gives rise to the associated bundle  and the determinant line bundle
and the determinant line bundle  .
. be the set of all Hermitian connections on
be the set of all Hermitian connections on  which is compatible with the Clifford multiplication.
which is compatible with the Clifford multiplication.
 as their input. We are now prepared to define these equations.
as their input. We are now prepared to define these equations. . Note that for
. Note that for  ,
,  so
so  . Therefore we have a Clifford structure
. Therefore we have a Clifford structure


 . Then the curvature is a matrix of 2-forms on M, so we can consider its self-dual and anti-self dual parts
. Then the curvature is a matrix of 2-forms on M, so we can consider its self-dual and anti-self dual parts  and
and  .
. denote the traceless part of the endomorphism
denote the traceless part of the endomorphism  .
. (the pertubation parameter). Then the Seiberg-Witten equations are:
(the pertubation parameter). Then the Seiberg-Witten equations are:
 which are solutions to these equations are called (
which are solutions to these equations are called ( -)monopoles.
-)monopoles. . It acts on
. It acts on 
 by multiplication, why do we define the action
by multiplication, why do we define the action  ? Specifically where is the 2 coming from?
? Specifically where is the 2 coming from? . We would really like to think of the gauge group as acting on
. We would really like to think of the gauge group as acting on  acts on
acts on  by multiplication
by multiplication  , then the induced action on
, then the induced action on  is multiplication by
is multiplication by  . (This goes back to the fact that in coordinate charts, the spinc structure is obtained by tensoring the spin structure with the square root of the determinant line bundle L.) Now we can look at how this acts on the covariant differentiation
. (This goes back to the fact that in coordinate charts, the spinc structure is obtained by tensoring the spin structure with the square root of the determinant line bundle L.) Now we can look at how this acts on the covariant differentiation  induced by the connection A on L. Here the natural action is conjugation
induced by the connection A on L. Here the natural action is conjugation
 we can consider its stabilizer in
we can consider its stabilizer in  . If the stabilizer of C is trivial, we say C is irreducible, otherwise we say C is reducible. It is easy to show that the reducible elements are exactly those with
. If the stabilizer of C is trivial, we say C is irreducible, otherwise we say C is reducible. It is easy to show that the reducible elements are exactly those with  , and that their stabilizers are the constant maps into
, and that their stabilizers are the constant maps into  .
. for which the Seiberg-Witten equations are satisfied. To obtain the moduli space from this, we want to mod out by the gauge action. In order for this to be well defined, we first need to check that the space is invariant under the gauge action.
for which the Seiberg-Witten equations are satisfied. To obtain the moduli space from this, we want to mod out by the gauge action. In order for this to be well defined, we first need to check that the space is invariant under the gauge action. because
because  and
and  because we can think locally that
because we can think locally that  so taking its exterior derivative gives 0. Furthermore
so taking its exterior derivative gives 0. Furthermore  , so the first equation is invariant under the gauge action.
, so the first equation is invariant under the gauge action. can be understood by breaking up the dirac operator into the composition of the Clifford multiplication and the connection
can be understood by breaking up the dirac operator into the composition of the Clifford multiplication and the connection  . Applying the Clifford multiplication to this connection acting on
. Applying the Clifford multiplication to this connection acting on  and using the Leibniz rule for connections eventually simplifies to show that
and using the Leibniz rule for connections eventually simplifies to show that  so the solutions to
so the solutions to  are invariant under the gauge action.
are invariant under the gauge action. then they satisfy
then they satisfy  for our chosen perturbation. Since both of these forms are closed, they represent cohomology classes. The cohomology class of the curvature
for our chosen perturbation. Since both of these forms are closed, they represent cohomology classes. The cohomology class of the curvature ![[F_A^+]=-2\pi ic_1(L)^+](https://s0.wp.com/latex.php?latex=%5BF_A%5E%2B%5D%3D-2%5Cpi+ic_1%28L%29%5E%2B&bg=ffffff&fg=333333&s=0&c=20201002) is independent of A, so we only have reducible solutions when
is independent of A, so we only have reducible solutions when ![[\eta]=-2\pi ic_1(L)^+](https://s0.wp.com/latex.php?latex=%5B%5Ceta%5D%3D-2%5Cpi+ic_1%28L%29%5E%2B&bg=ffffff&fg=333333&s=0&c=20201002) . When the dimension of the positive second homology is at least 1, then a generic perturbation will avoid this phenomenon.
. When the dimension of the positive second homology is at least 1, then a generic perturbation will avoid this phenomenon. so its cohomology has a canonical generator in even degrees. By evaluating this generator against the homology class of the Seiberg-Witten moduli space we obtain an integer
so its cohomology has a canonical generator in even degrees. By evaluating this generator against the homology class of the Seiberg-Witten moduli space we obtain an integer  .
. , the subspace of perturbations which allows for reducible solutions (bad perturbations) is codimension 2. Since the space of metrics on a manifold is convex, we can find a path through the space of metrics and good perturbations connecting any two pairs
, the subspace of perturbations which allows for reducible solutions (bad perturbations) is codimension 2. Since the space of metrics on a manifold is convex, we can find a path through the space of metrics and good perturbations connecting any two pairs  which lifts to a cobordism between the moduli space at
which lifts to a cobordism between the moduli space at  and the moduli space at
and the moduli space at  . Therefore SW gives a diffeomorphism invariant of the 4-manifold, and it has been used very effectively to distinguish many homeomorphic but not diffeomorphic 4-manifolds (exotic pairs).
. Therefore SW gives a diffeomorphism invariant of the 4-manifold, and it has been used very effectively to distinguish many homeomorphic but not diffeomorphic 4-manifolds (exotic pairs). , there is a codimension 1 space of bad perturbations which forms a wall between two chambers. Within each chamber
, there is a codimension 1 space of bad perturbations which forms a wall between two chambers. Within each chamber  stays constant, and there is a well-understood wall-crossing formula describing the difference of SW in the two different chambers. By keeping track of a little more information, it is still possible to use information from the Seiberg-Witten invariants to distinguish exotic pairs (this has been used a lot for finding exotic
stays constant, and there is a well-understood wall-crossing formula describing the difference of SW in the two different chambers. By keeping track of a little more information, it is still possible to use information from the Seiberg-Witten invariants to distinguish exotic pairs (this has been used a lot for finding exotic  ).
). are called generalized Laplacians. Note that the symbol
are called generalized Laplacians. Note that the symbol  of a generalized Laplacian is an isomorphism on each fiber for
of a generalized Laplacian is an isomorphism on each fiber for  , which means generalized Laplacians are elliptic operators. An elliptic operator L is good because there are estimates on the norms of solutions to equations of the form
, which means generalized Laplacians are elliptic operators. An elliptic operator L is good because there are estimates on the norms of solutions to equations of the form  . This allows us to use Fredholm theory to describe the space of solutions to equations using elliptic operators. (In particular the linearization of an elliptic operator is Fredholm, i.e. has finite dimensional kernel and cokernel).
. This allows us to use Fredholm theory to describe the space of solutions to equations using elliptic operators. (In particular the linearization of an elliptic operator is Fredholm, i.e. has finite dimensional kernel and cokernel). , for
, for  . Additionally, one can show that the symbol of a Dirac operator (which squares to a generalized Laplacian), is the square root of the symbol of the generalized Laplacian. Therefore
. Additionally, one can show that the symbol of a Dirac operator (which squares to a generalized Laplacian), is the square root of the symbol of the generalized Laplacian. Therefore  so
so  gives us a Clifford multiplication. In conclusion, a Dirac operator give rise to a Clifford structures by taking its symbol.
gives us a Clifford multiplication. In conclusion, a Dirac operator give rise to a Clifford structures by taking its symbol. (equivalently
(equivalently  ) and a connection
) and a connection  we can compose them
we can compose them 
 , which has nice properties namely it preserves the metric g (this can be phrased either as
, which has nice properties namely it preserves the metric g (this can be phrased either as  or
or  ), and it is torsion free meaning
), and it is torsion free meaning ![\nabla_XY-\nabla_YX-[X,Y]=0](https://s0.wp.com/latex.php?latex=%5Cnabla_XY-%5Cnabla_YX-%5BX%2CY%5D%3D0&bg=ffffff&fg=333333&s=0&c=20201002) . Basically, this is a natural connection on TM when a Riemannian metric g is given.
. Basically, this is a natural connection on TM when a Riemannian metric g is given. -bundle. Namely, we can find gluing maps defining the tangent bundle that map into
-bundle. Namely, we can find gluing maps defining the tangent bundle that map into  which define a principal
which define a principal  . The Levi-Civita connection on TM induces a principal
. The Levi-Civita connection on TM induces a principal  specified locally by
specified locally by
 , which induces, by differentiating at 1, an isomorphism
, which induces, by differentiating at 1, an isomorphism  .
. such that
such that  . These define a principal Spin(n) bundle
. These define a principal Spin(n) bundle  . In this case, the Levi-Civita connection on
. In this case, the Levi-Civita connection on  on
on 
 , and
, and  give rise to an associated bundle
give rise to an associated bundle  . The spin connection on M induces a connection
. The spin connection on M induces a connection  on
on  whose local matrix valued 1-forms are defined by
whose local matrix valued 1-forms are defined by 
 acts on
acts on  . The composition of the Clifford multiplication with the induced connection on
. The composition of the Clifford multiplication with the induced connection on  .
. connections
connections -bundle is specified by gluing data
-bundle is specified by gluing data 

 structures for M and their connections. Let
structures for M and their connections. Let  bundle
bundle  .
. , the associated spinor bundle to
, the associated spinor bundle to  , which splits into
, which splits into  . A connection on the
. A connection on the  . Also note that
. Also note that  .
. and
and  .
. and
and  . We have the natural lift
. We have the natural lift  . This induces a natural connection
. This induces a natural connection  to get a connection on
to get a connection on  .
. with a line bundle with connection
with a line bundle with connection  to obtain a triple
to obtain a triple  where
where

 .
. as follows. If the connection on
as follows. If the connection on 

 , to obtain
, to obtain  on each trivial chart
on each trivial chart  . Finally, one can use a partition of unity to glue all these pieces back together to a global Dirac triple
. Finally, one can use a partition of unity to glue all these pieces back together to a global Dirac triple  .
. ,
,
 , any map
, any map  satisfying
satisfying  for all
for all  (equivalently satisfying
(equivalently satisfying  for all v) extends to a representation
for all v) extends to a representation
 denote the Clifford algebra of
denote the Clifford algebra of  with its standard inner product. Let
with its standard inner product. Let  denote the standard orthonormal basis for
denote the standard orthonormal basis for  .
. grading on
grading on  identifying
identifying  . The integer grading on the exterior power reduces to a
. The integer grading on the exterior power reduces to a  . Define
. Define  to be the intersection of
to be the intersection of  .
. is a unit vector (i.e. a generator of
is a unit vector (i.e. a generator of 

 so
so  , and the relation
, and the relation  in the Clifford algebra. This can be interpreted geometrically: the action
in the Clifford algebra. This can be interpreted geometrically: the action  is the reflection of x over the hyperplane orthogonal to v.
is the reflection of x over the hyperplane orthogonal to v.
 where
where  (extend linearly). Restricting this to
(extend linearly). Restricting this to  this is just usual conjugation, which corresponds to an even number of reflections so the image lies in
this is just usual conjugation, which corresponds to an even number of reflections so the image lies in  :
:
 , we see that the kernel of
, we see that the kernel of  . Because these are nice smooth compact Lie groups, this implies that
. Because these are nice smooth compact Lie groups, this implies that  is a covering map. To check it is not the trivial double cover, we can find a path in
is a covering map. To check it is not the trivial double cover, we can find a path in 
![t\in [-\pi,\pi]](https://s0.wp.com/latex.php?latex=t%5Cin+%5B-%5Cpi%2C%5Cpi%5D&bg=ffffff&fg=333333&s=0&c=20201002) [observe this path is a product of two unit vectors at each t and is thus in
[observe this path is a product of two unit vectors at each t and is thus in  so
so  and
and  . However, it is useful to understand these representations from the Clifford algebra perspective so that the representations carry the additional information of a Clifford structure. In fact, there is a complex representation of the entire (complexified) Clifford algebra
. However, it is useful to understand these representations from the Clifford algebra perspective so that the representations carry the additional information of a Clifford structure. In fact, there is a complex representation of the entire (complexified) Clifford algebra  which splits into a direct sum of two complex rank two representations, which behave nicely with respect to the
which splits into a direct sum of two complex rank two representations, which behave nicely with respect to the  with
with  , and an
, and an  -linear isomorphism
-linear isomorphism
 and
and  .
. ,
,  , and the map c, and then verify that c is an algebra isomorphism satisfying the specified properties. There are a lot of things to check so I will define everything, and say a few things about how the map c works which hopefully make it more believable that c is an algebra isomorphism.
, and the map c, and then verify that c is an algebra isomorphism satisfying the specified properties. There are a lot of things to check so I will define everything, and say a few things about how the map c works which hopefully make it more believable that c is an algebra isomorphism. with standard coordinates and standard almost complex structure J. This almost complex structure gives rise to a splitting of
with standard coordinates and standard almost complex structure J. This almost complex structure gives rise to a splitting of  , where
, where  is the i-eigenspace of J and
is the i-eigenspace of J and  is the -i-eigenspace of J. We have orthonormal bases for these pieces given by:
is the -i-eigenspace of J. We have orthonormal bases for these pieces given by:

 , and its splitting by
, and its splitting by  and
and  .
. with the properties specified in the theorem. We will define c on elements of
with the properties specified in the theorem. We will define c on elements of  and then extend this to a map on the Clifford algebra by setting
and then extend this to a map on the Clifford algebra by setting  and extending complex linearly. To specify c on
and extending complex linearly. To specify c on  ,
,  is the endomorphism of
is the endomorphism of 

 is contraction with
is contraction with  :
:

 . However, the algebra structure we want to preserve is complex linear on
. However, the algebra structure we want to preserve is complex linear on  and has the Clifford structure only on the
and has the Clifford structure only on the  piece. Therefore, for example when
piece. Therefore, for example when  ,
,
 we split this into the
we split this into the 
 at least on the
at least on the  part of
part of  (since any map that starts with contraction vanishes and
(since any map that starts with contraction vanishes and  for
for  a complex number, and
a complex number, and  ).
). ,
,  to
to  and vice versa. Extending this over the entire Clifford algebra, we see that the endomorphisms in
and vice versa. Extending this over the entire Clifford algebra, we see that the endomorphisms in  preserve
preserve  sends
sends  .
. .
. , producing a complex vector space
, producing a complex vector space  which splits where
which splits where  , whose endomorphisms are isomorphic to
, whose endomorphisms are isomorphic to  , where
, where  preserves the splitting and
preserves the splitting and  switches the components. In the odd dimensional case, the situation is slightly different, but reduces to the even case by showing that
switches the components. In the odd dimensional case, the situation is slightly different, but reduces to the even case by showing that  . For the purposes of Seiberg-Witten Floer homology, it will be useful to know
. For the purposes of Seiberg-Witten Floer homology, it will be useful to know  which implies
which implies  .
. , and
, and 

 for
for  ,
,  .
. .
. . These bundles show up in the set-up for the Seiberg-Witten configuration space, which I will get to in another post.
. These bundles show up in the set-up for the Seiberg-Witten configuration space, which I will get to in another post. uniquely up to isomorphism by cocycle data
uniquely up to isomorphism by cocycle data  , where
, where  is an open cover of M, and
is an open cover of M, and  satisfy the “cocycle condition”
satisfy the “cocycle condition”
 and quotienting out by identifications of the fibers
and quotienting out by identifications of the fibers  and
and  above a point
above a point  by the isomorphism
by the isomorphism  . The cocycle condition ensures that everything glues up coherently to a global vector bundle. Similarly a principal G-bundle can be specified by cocycle data
. The cocycle condition ensures that everything glues up coherently to a global vector bundle. Similarly a principal G-bundle can be specified by cocycle data  where now
where now  and
and  for
for  . It is frequently useful for computations to think about vector bundles and principal bundles through these local trivializations, keeping track of the gluing maps.
. It is frequently useful for computations to think about vector bundles and principal bundles through these local trivializations, keeping track of the gluing maps. . By choosing a metric and orientation, we can reduce its structure group to
. By choosing a metric and orientation, we can reduce its structure group to  have image in
have image in  ,
,  so
so 

 and
and  using the following idea. Identify
using the following idea. Identify  with the quaternions. Observe that
with the quaternions. Observe that  can be identified with the unit quaternions, and that the unit quaternions act by conjugation on the imaginary quaternions in a norm-preserving way. This action by conjugation induces a map from
can be identified with the unit quaternions, and that the unit quaternions act by conjugation on the imaginary quaternions in a norm-preserving way. This action by conjugation induces a map from  whose kernel is
whose kernel is  . Similarly an action of
. Similarly an action of  on the quaternions can be defined by
on the quaternions can be defined by  . Again one can check this action is orthogonal so there is an induced map
. Again one can check this action is orthogonal so there is an induced map  .
. , and similarly define
, and similarly define  . These can be viewed as representations, so if
. These can be viewed as representations, so if  is a
is a  structure on
structure on  , we obtain two complex rank 2 associated bundles
, we obtain two complex rank 2 associated bundles
 structure, we also have two projections:
structure, we also have two projections:
 . In this case
. In this case  .
. , which can be viewed as a Cech cohomology class as follows. If
, which can be viewed as a Cech cohomology class as follows. If  are the gluing maps for the
are the gluing maps for the  . Then
. Then
 is a Cech 2-cycle and so it represents a Cech cohomology class, called the second Stiefel-Whitney class
is a Cech 2-cycle and so it represents a Cech cohomology class, called the second Stiefel-Whitney class  satisfy the cocycle condition:
satisfy the cocycle condition:  , this cohomology class vanishes and the
, this cohomology class vanishes and the  , a
, a  for the
for the 

 (the
(the  (cocycle condition)
(cocycle condition) , we almost get a
, we almost get a  bundle except that instead of the cocycle condition we have that
bundle except that instead of the cocycle condition we have that  . Because
. Because  is abelian, by looking instead at
is abelian, by looking instead at  , we obtain gluing maps satisfying the cocycle condition, so they form a genuine
, we obtain gluing maps satisfying the cocycle condition, so they form a genuine  as follows. Write
as follows. Write  . Then
. Then
 ), and the
), and the  define the cocycle representing
define the cocycle representing  .
. given by requirement (2) above. Namely,
given by requirement (2) above. Namely,
 where the group structure is multiplication, and
where the group structure is multiplication, and  where the group structure is addition.) Since
where the group structure is addition.) Since  represents
represents  .
. , and a
, and a ![[h_{\alpha\beta}, z_{\alpha\beta}]](https://s0.wp.com/latex.php?latex=%5Bh_%7B%5Calpha%5Cbeta%7D%2C+z_%7B%5Calpha%5Cbeta%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) ,
,  is defined by
is defined by ![[h_{\alpha\beta}, z_{\alpha\beta}\zeta_{\alpha\beta}]](https://s0.wp.com/latex.php?latex=%5Bh_%7B%5Calpha%5Cbeta%7D%2C+z_%7B%5Calpha%5Cbeta%7D%5Czeta_%7B%5Calpha%5Cbeta%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) . Observe that
. Observe that  so
so  . One can prove that the action of the line bundles on the set of
. One can prove that the action of the line bundles on the set of  , obtained by composing the maps
, obtained by composing the maps  with the obvious map
with the obvious map  sending
sending  to
to ![[(g,1)]](https://s0.wp.com/latex.php?latex=%5B%28g%2C1%29%5D&bg=ffffff&fg=333333&s=0&c=20201002) where
where ![[\cdot]](https://s0.wp.com/latex.php?latex=%5B%5Ccdot%5D&bg=ffffff&fg=333333&s=0&c=20201002) denotes the equivalence class by modding out by
denotes the equivalence class by modding out by  where
where  satisfy the cocycle condition (since
satisfy the cocycle condition (since  do). In other words the
do). In other words the  , and the associated line bundle is
, and the associated line bundle is  . Therefore any
. Therefore any 